
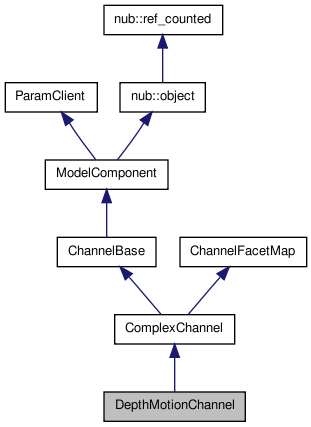
A Depth channel for computing saliency based on a distance/depth to objects. More...
#include <Channels/DepthMotionChannel.H>
Public Member Functions | |
| DepthMotionChannel (OptionManager &mgr) | |
| Construct with standard params. | |
| virtual | ~DepthMotionChannel () |
| Destructor. | |
| virtual DirectionChannel & | dirChan (const uint idx) const |
| returns a specific DirectionChannel | |
| virtual void | paramChanged (ModelParamBase *const param, const bool valueChanged, ParamClient::ChangeStatus *status) |
| Overload so that we can reconfigure when our params get changed. | |
Protected Member Functions | |
| virtual void | buildSubChans () |
| (re-)build our subchannels | |
| virtual void | doInput (const InputFrame &inframe) |
| DepthMotionChannel requires only depth input. | |
Protected Attributes | |
| OModelParam< LevelSpec > | itsLevelSpec |
| NModelParam< PyramidType > | itsPyrType |
| type of pyramid to use in our DirectionChannel subcomponents | |
| OModelParam< uint > | itsNumDirs |
| number of DirectionChannel subcomponents | |
A Depth channel for computing saliency based on a distance/depth to objects.
This channel will compute a depth map using orientations and intensity in the usual way one would do so with a standard input image. This gives conspicuity to objects in an image based on how far they are from the camera.
Definition at line 55 of file DepthMotionChannel.H.
| DepthMotionChannel::DepthMotionChannel | ( | OptionManager & | mgr | ) |
Construct with standard params.
Definition at line 50 of file DepthMotionChannel.C.
References buildSubChans().
| DepthMotionChannel::~DepthMotionChannel | ( | ) | [virtual] |
Destructor.
Definition at line 66 of file DepthMotionChannel.C.
| void DepthMotionChannel::buildSubChans | ( | ) | [protected, virtual] |
(re-)build our subchannels
Definition at line 80 of file DepthMotionChannel.C.
References ComplexChannel::addSubChan(), ModelComponent::getManager(), OModelParam< T >::getVal(), NModelParam< T >::getVal(), itsNumDirs, itsPyrType, makeSharedComp(), MC_RECURSE, and ComplexChannel::removeAllSubChans().
Referenced by DepthMotionChannel(), and paramChanged().
| DirectionChannel & DepthMotionChannel::dirChan | ( | const uint | idx | ) | const [virtual] |
returns a specific DirectionChannel
Definition at line 72 of file DepthMotionChannel.C.
References ComplexChannel::subChan().
| void DepthMotionChannel::doInput | ( | const InputFrame & | inframe | ) | [protected, virtual] |
DepthMotionChannel requires only depth input.
Implements ChannelBase.
Definition at line 120 of file DepthMotionChannel.C.
References ASSERT, Image< T >::initialized(), ComplexChannel::numChans(), and ComplexChannel::subChan().
| void DepthMotionChannel::paramChanged | ( | ModelParamBase *const | param, | |
| const bool | valueChanged, | |||
| ParamClient::ChangeStatus * | status | |||
| ) | [virtual] |
Overload so that we can reconfigure when our params get changed.
Reimplemented from ModelComponent.
Definition at line 105 of file DepthMotionChannel.C.
References buildSubChans(), OModelParam< T >::getVal(), itsNumDirs, and ComplexChannel::numChans().
OModelParam<uint> DepthMotionChannel::itsNumDirs [protected] |
number of DirectionChannel subcomponents
Definition at line 80 of file DepthMotionChannel.H.
Referenced by buildSubChans(), and paramChanged().
NModelParam<PyramidType> DepthMotionChannel::itsPyrType [protected] |
type of pyramid to use in our DirectionChannel subcomponents
Definition at line 77 of file DepthMotionChannel.H.
Referenced by buildSubChans().
 1.6.3
1.6.3