
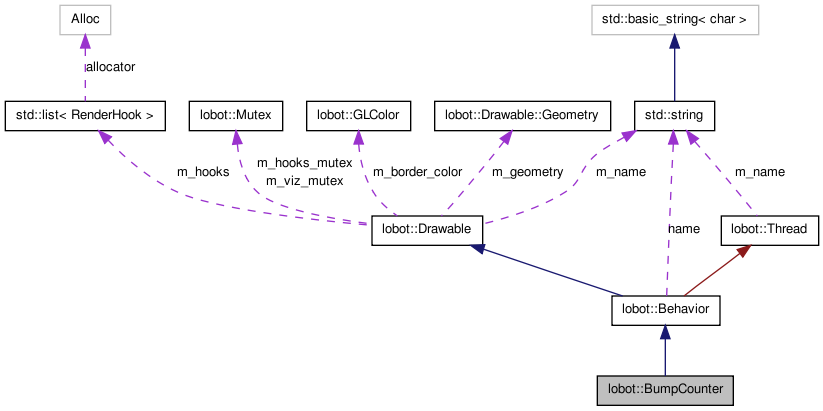
A behaviour for "counting" bump events. More...
#include <Robots/LoBot/control/LoBumpCounter.H>
Friends | |
| class | subfactory< BumpCounter, base > |
A behaviour for "counting" bump events.
This class implements a behaviour that logs all low-level bump sensor events to the Robolocust metrics log so that, at the end of a run/experiment, we can tell how many times and where all the LGMD-based (and, potentially, other) behaviours failed to get the robot to avoid obstacles.
NOTE: This behaviour does not vote for any motor actions or perform any visualization.
Definition at line 77 of file LoBumpCounter.H.
 1.6.3
1.6.3