
Public Member Functions | |
| VisionBrainComponentI (OptionManager &mgr, const std::string &descrName="VisionBrainComponent", const std::string &tagName="VisionBrainComponent") | |
| virtual void | evolve () |
| Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here. | |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a message. | |
| virtual void | registerVisionTopics () |
| virtual void | registerVisionPublisher (const std::string &MessageTopic) |
| virtual bool | publishVisionMsg (const ::std::string &MessageTopic, RobotSimEvents::EventMessagePtr msg) |
| virtual void | updateFrame (Image< PixRGB< byte > > img, bool isFwdCamera) |
| virtual void | updateFrame (Image< PixRGB< byte > > img, string cameraID) |
| std::string | getCameraSourceName () |
| VisionBrainComponentI (OptionManager &mgr, const std::string &descrName="VisionBrainComponent", const std::string &tagName="VisionBrainComponent") | |
| virtual void | evolve () |
| Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here. | |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a message. | |
| virtual void | registerVisionTopics () |
| virtual void | registerVisionPublisher (const std::string &MessageTopic) |
| virtual bool | publishVisionMsg (const ::std::string &MessageTopic, RobotSimEvents::EventMessagePtr msg) |
| virtual void | updateFrame (Image< PixRGB< byte > > img, std::string cameraID)=0 |
| std::string | getCameraSourceName () |
Protected Attributes | |
| int | itsFrameCount |
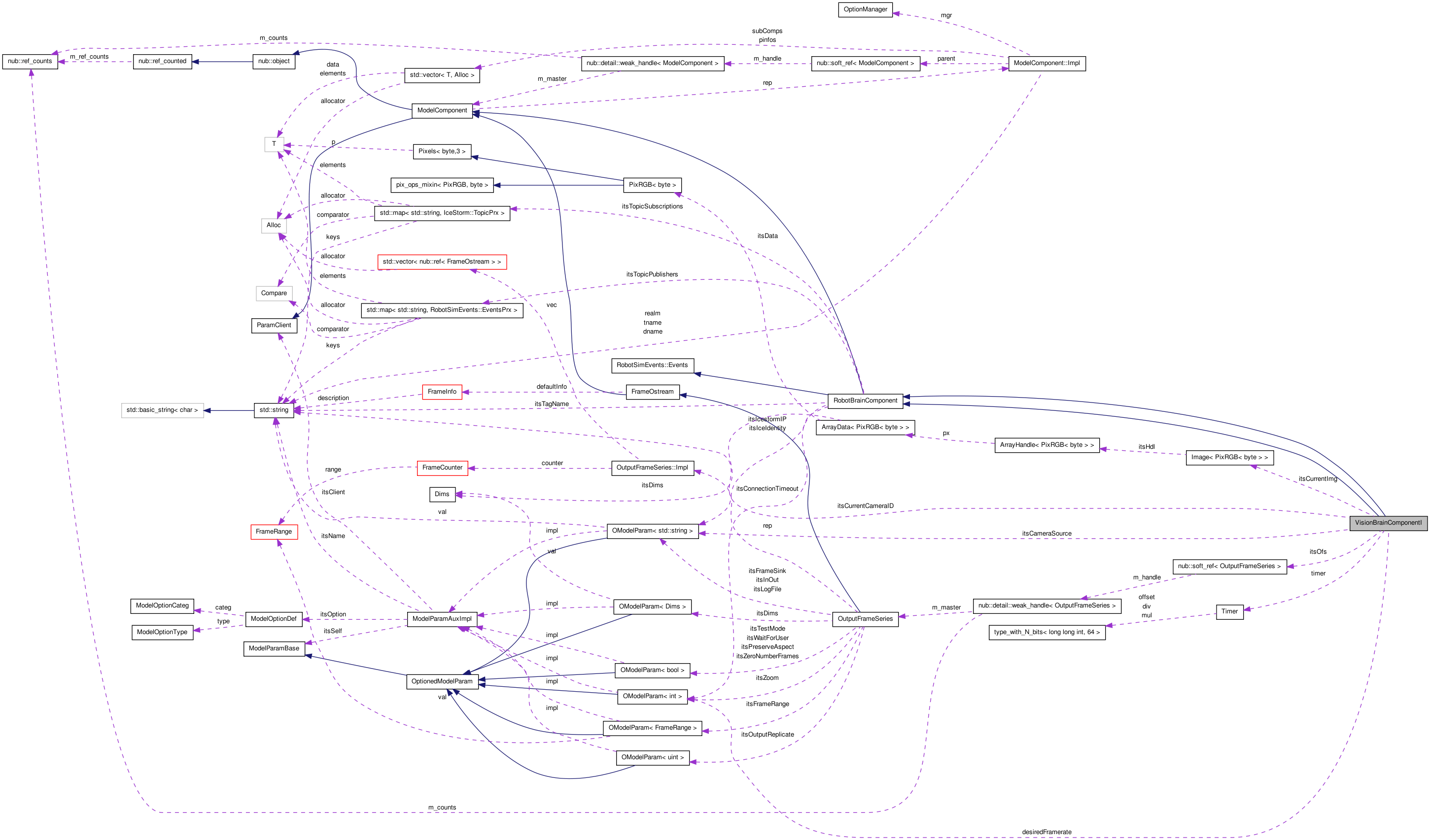
| OModelParam< int > | desiredFramerate |
| nub::soft_ref< OutputFrameSeries > | itsOfs |
Definition at line 66 of file VisionBrainComponentI.H.
| virtual void VisionBrainComponentI::evolve | ( | ) | [virtual] |
Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here.
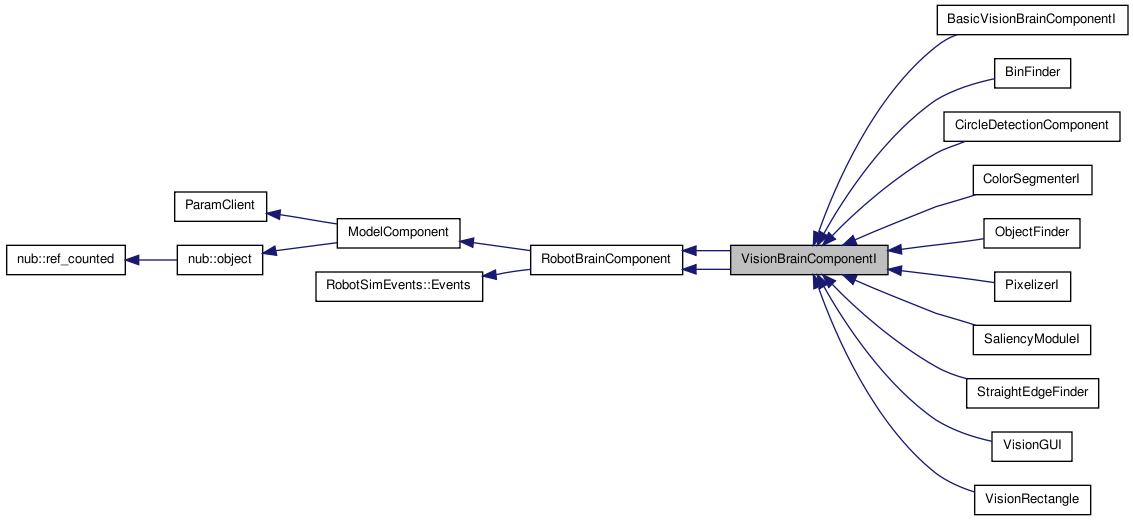
Reimplemented from RobotBrainComponent.
| void VisionBrainComponentI::evolve | ( | ) | [virtual] |
Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here.
Reimplemented from RobotBrainComponent.
Definition at line 58 of file VisionBrainComponentI.C.
References Timer::get(), OModelParam< T >::getVal(), and Image< T >::initialized().
| virtual void VisionBrainComponentI::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a message.
Reimplemented from RobotBrainComponent.
| void VisionBrainComponentI::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a message.
Reimplemented from RobotBrainComponent.
Definition at line 84 of file VisionBrainComponentI.C.
References Timer::get(), OModelParam< T >::getVal(), and Timer::reset().
 1.6.3
1.6.3