
Public Member Functions | |
| FaceDetector (OptionManager &mgr, const std::string &descrName="FaceDetector", const std::string &tagName="FaceDetector") | |
| virtual void | evolve () |
| Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here. | |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a message. | |
| virtual void | registerTopics () |
| and registerPublisher calls that you would like to happen automatically after init. | |
| Image< PixRGB< byte > > | findFaces (Image< PixRGB< byte > > ima) |
| void | start1 () |
| This is called from within start() before the subcomponents start. | |
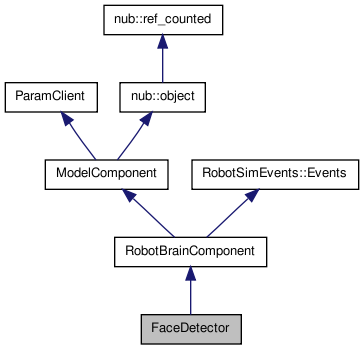
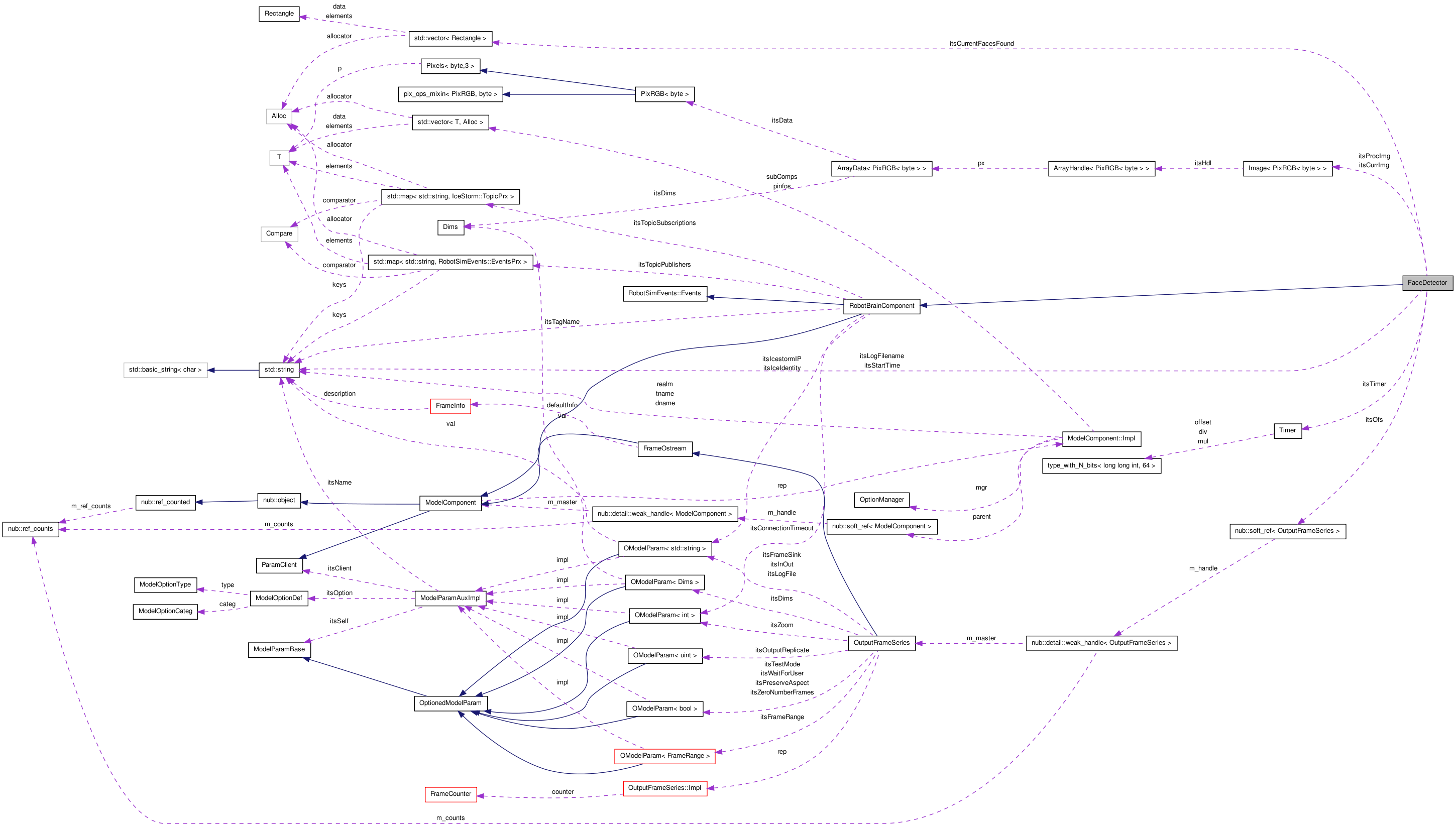
Definition at line 61 of file FaceDetector.H.
| void FaceDetector::evolve | ( | ) | [virtual] |
Evolve: Gets called by run in a while(1) loop. Anything that you want to happen continuously should go in here.
Reimplemented from RobotBrainComponent.
Definition at line 84 of file FaceDetector.C.
References Timer::get(), RobotBrainComponent::publish(), and Timer::reset().
| void FaceDetector::registerTopics | ( | ) | [virtual] |
and registerPublisher calls that you would like to happen automatically after init.
Register Topics: This function is called at the end of init, and is virtual so that is can be overloaded by chid classes. In your overloaded version you should put all of the registerSubsciption
Reimplemented from RobotBrainComponent.
Definition at line 75 of file FaceDetector.C.
References RobotBrainComponent::registerPublisher(), and RobotBrainComponent::registerSubscription().
| void FaceDetector::start1 | ( | ) | [virtual] |
This is called from within start() before the subcomponents start.
Reimplemented from ModelComponent.
Definition at line 67 of file FaceDetector.C.
References Timer::reset().
| void FaceDetector::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a message.
Reimplemented from RobotBrainComponent.
Definition at line 135 of file FaceDetector.C.
References Timer::get().
 1.6.3
1.6.3