
#include "Component/ModelManager.H"#include "Component/OptionManager.H"#include "Controllers/PID.H"#include "Devices/FrameGrabberConfigurator.H"#include "Devices/sc8000.H"#include "GUI/XWindow.H"#include "Image/ColorOps.H"#include "Image/CutPaste.H"#include "Image/DrawOps.H"#include "Image/Image.H"#include "Image/MathOps.H"#include "Image/Pixels.H"#include "Image/ShapeOps.H"#include "RCBot/Motion/MotionEnergy.H"#include "Raster/Raster.H"#include "Transport/FrameIstream.H"#include "Util/Timer.H"#include "Util/Types.H"#include "Util/log.H"#include <math.h>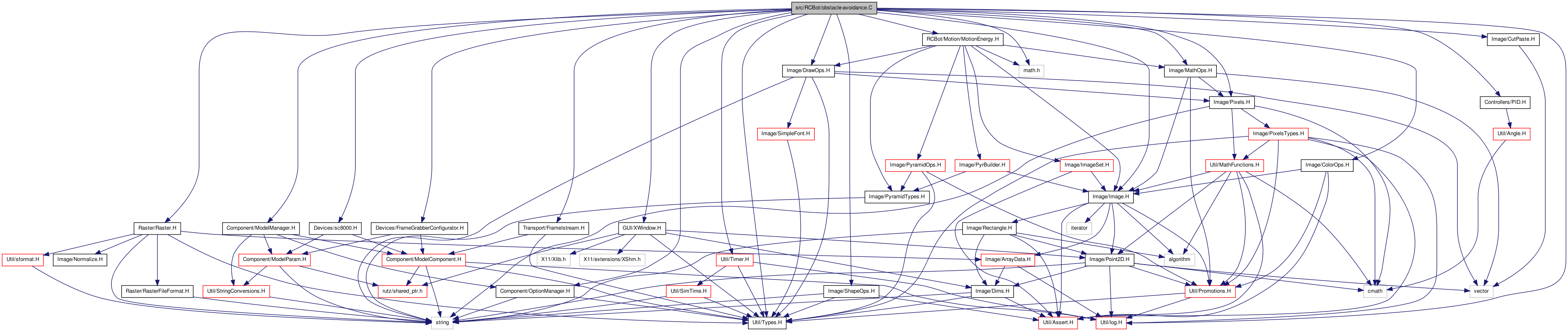
Go to the source code of this file.
Functions | |
| int | main (const int argc, const char **argv) |
Variables | |
| XWindow * | window |
avoide obstacles by determining the total right and left motion, and moving to the lowest motion. That is, move, where the space is free
Definition in file obstacle-avoidance.C.
 1.6.3
1.6.3