
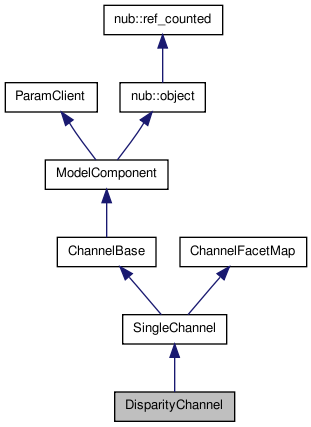
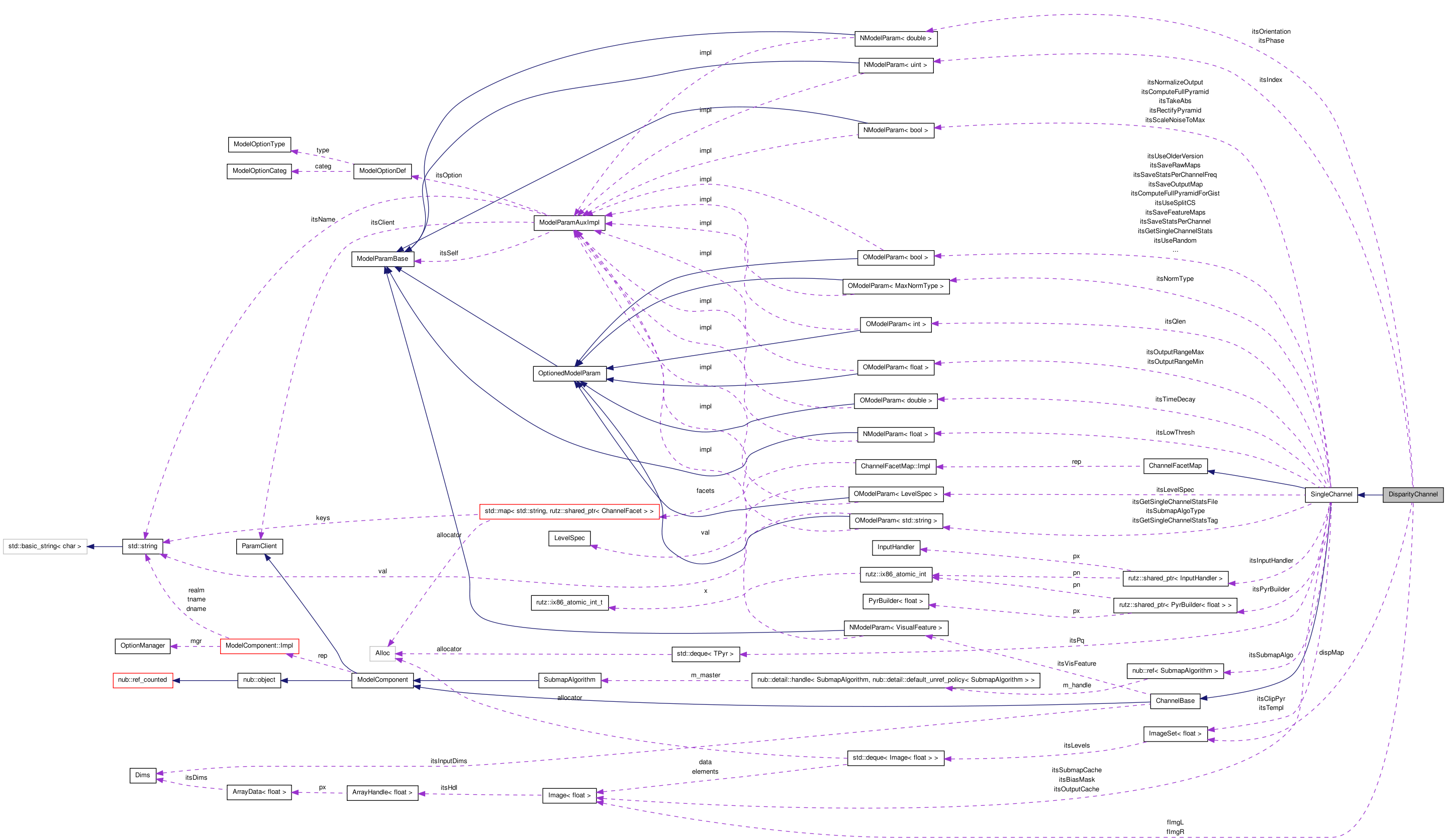
An disparity channel. More...
#include <Channels/DisparityChannel.H>
Public Member Functions | |
| DisparityChannel (OptionManager &mgr, const uint dIndex, const double ang, const double pha) | |
| Construct with standard params plus a disparity index for this object. | |
| virtual | ~DisparityChannel () |
| Destructor. | |
| double | angle () const |
| Get the preferred orientation (in degrees) of this channel. | |
| double | phase () const |
| Get the preferred phase (in degrees) of this channel. | |
| void | setRawFilteredImages (Image< float > ***fImgLE, Image< float > ***fImgRI) |
| set the raw filtered images from stereo channel to avoid redundancy | |
| void | getRawFilteredImages (Image< float > ****fImgLE, Image< float > ****fImgRI) |
| access to the raw filtered images for easy viewing | |
| void | getDispMap (ImageSet< float > *dMap) |
| access to the disparity even before stored in the queue (SingleChannel) | |
| void | normalizeDispMap (ImageSet< float > tDispMap, int nChan) |
| normalize the disparity map to [0, 1] | |
| void | setNumPhase (int n) |
| to get the dimensions of the raw filtered images from stereo channel | |
| void | setNumTheta (int t) |
| void | doInput (const InputFrame &inframe) |
| perform the disparity calculation | |
| void | storePyramid (const SimTime &t) |
| void | start1 () |
| overload start1() | |
Protected Attributes | |
| NModelParam< uint > | itsIndex |
| NModelParam< double > | itsOrientation |
| NModelParam< double > | itsPhase |
An disparity channel.
Definition at line 45 of file DisparityChannel.H.
| DisparityChannel::DisparityChannel | ( | OptionManager & | mgr, | |
| const uint | dIndex, | |||
| const double | ang, | |||
| const double | pha | |||
| ) |
Construct with standard params plus a disparity index for this object.
| dIndex | is used for various indexing such as with ParamMap and Jet interfacing. | |
| ang | is the preferred orientation disparity for this channel, in degrees (0..180). | |
| pha | is the preferred phase disparity for this channel, in degrees (0..360). |
Definition at line 53 of file DisparityChannel.C.
References ModelComponent::setDescriptiveName(), ModelComponent::setTagName(), and sformat().
| DisparityChannel::~DisparityChannel | ( | ) | [virtual] |
Destructor.
Definition at line 67 of file DisparityChannel.C.
| double DisparityChannel::angle | ( | ) | const |
Get the preferred orientation (in degrees) of this channel.
Definition at line 82 of file DisparityChannel.C.
References NModelParam< T >::getVal().
| void DisparityChannel::doInput | ( | const InputFrame & | inframe | ) | [virtual] |
perform the disparity calculation
Reimplemented from SingleChannel.
Definition at line 148 of file DisparityChannel.C.
References buildPyrGaussian(), Image< T >::getHeight(), NModelParam< T >::getVal(), Image< T >::getWidth(), height, inplaceRectify(), shiftImage(), squared(), SingleChannel::storePyramid(), and ZEROS.
Referenced by StereoChannel::doInput().
| void DisparityChannel::getDispMap | ( | ImageSet< float > * | dMap | ) |
access to the disparity even before stored in the queue (SingleChannel)
Definition at line 110 of file DisparityChannel.C.
| void DisparityChannel::getRawFilteredImages | ( | Image< float > **** | fImgLE, | |
| Image< float > **** | fImgRI | |||
| ) |
access to the raw filtered images for easy viewing
Definition at line 102 of file DisparityChannel.C.
| void DisparityChannel::normalizeDispMap | ( | ImageSet< float > | tDispMap, | |
| int | nChan | |||
| ) |
normalize the disparity map to [0, 1]
Definition at line 116 of file DisparityChannel.C.
References getMinMax(), inplaceRectify(), max(), and min().
| double DisparityChannel::phase | ( | ) | const |
Get the preferred phase (in degrees) of this channel.
Definition at line 88 of file DisparityChannel.C.
References NModelParam< T >::getVal().
| void DisparityChannel::setNumPhase | ( | int | n | ) |
to get the dimensions of the raw filtered images from stereo channel
Definition at line 136 of file DisparityChannel.C.
Referenced by StereoChannel::buildSubChans().
| void DisparityChannel::setRawFilteredImages | ( | Image< float > *** | fImgLE, | |
| Image< float > *** | fImgRI | |||
| ) |
set the raw filtered images from stereo channel to avoid redundancy
Definition at line 94 of file DisparityChannel.C.
Referenced by StereoChannel::doInput().
| void DisparityChannel::start1 | ( | ) | [virtual] |
overload start1()
Reimplemented from SingleChannel.
Definition at line 71 of file DisparityChannel.C.
References OModelParam< T >::getVal(), LevelSpec::maxDepth(), and ImageSet< T >::reset().
 1.6.3
1.6.3