
A DAMN speed arbiter for controlling Robolocust's speed. More...
#include <Robots/LoBot/control/LoSpeedArbiter.H>
Classes | |
| class | compare_priorities |
| class | Vote |
Friends | |
| class | singleton< SpeedArbiter > |
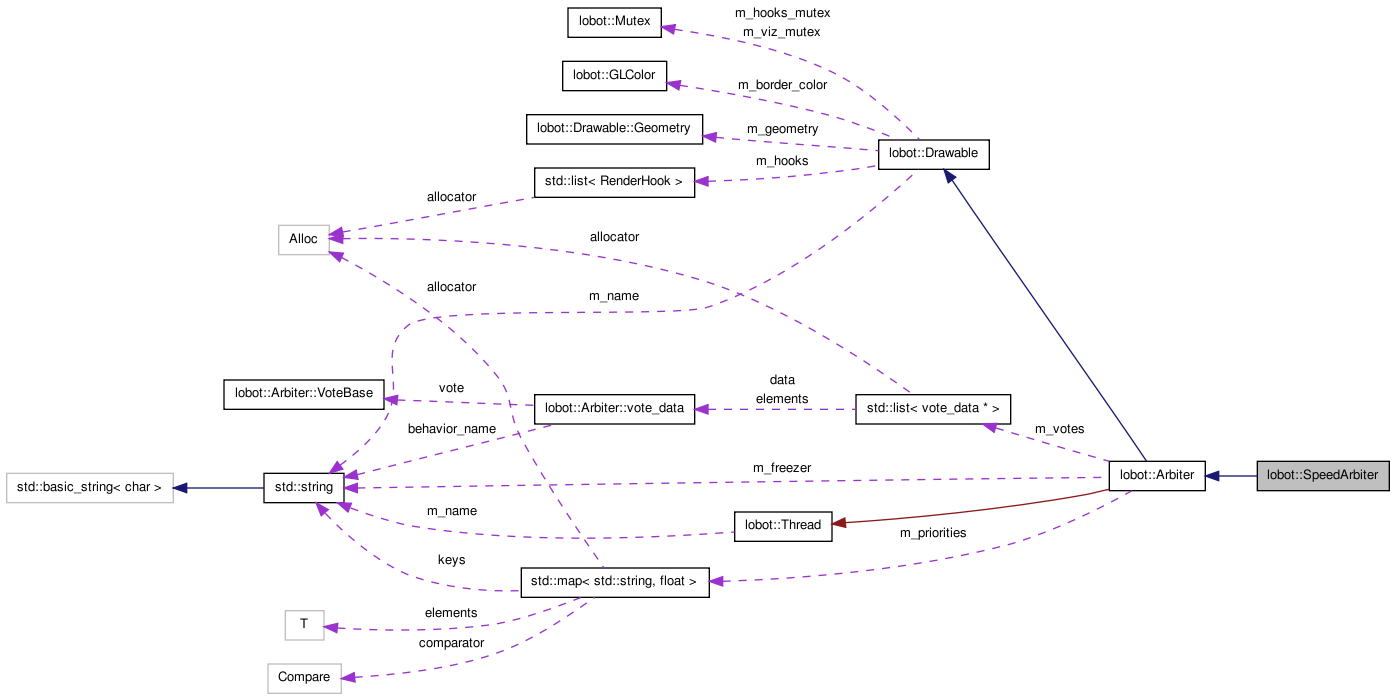
A DAMN speed arbiter for controlling Robolocust's speed.
This class implements a DAMN speed arbiter that acts as the interface between the Robolocust behaviours and the robot's speed controls. Each behaviour that wants to influence the robot's driving speed will have to vote by specifying an acceptable maximum speed value. The arbiter will issue the motor control command for the highest priority behaviour.
Definition at line 73 of file LoSpeedArbiter.H.
 1.6.3
1.6.3