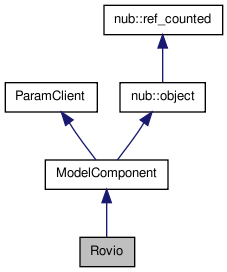
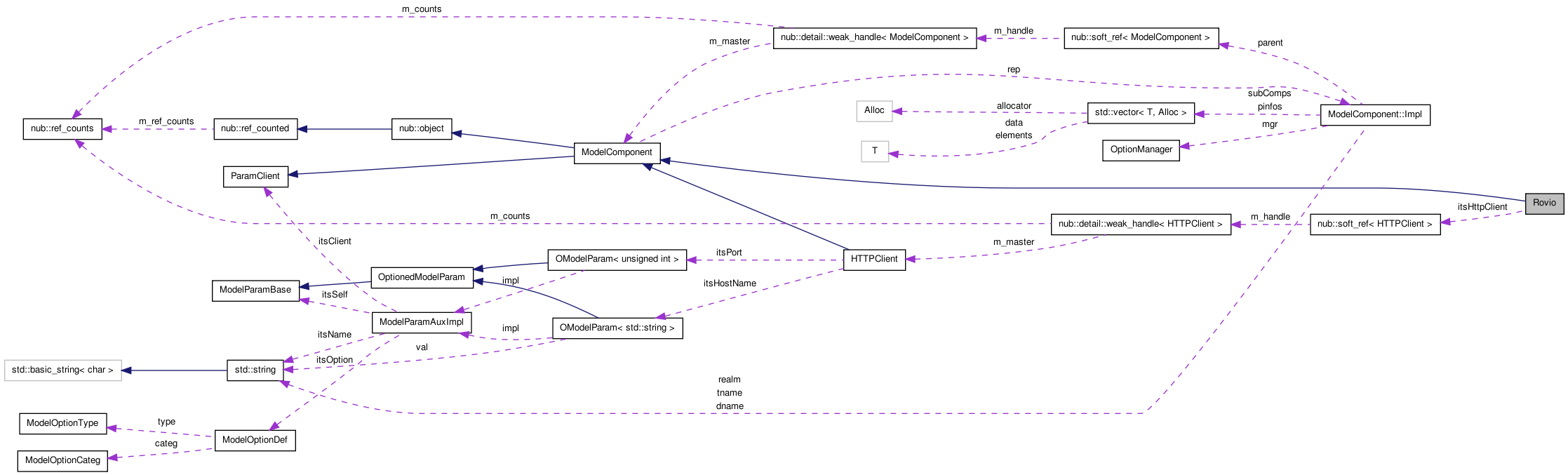
Rovio Class Reference
List of all members.
Public Types |
| enum | DRIVE_PARAMS {
STOP,
FORWARD,
BACKWARD,
STRAIGHT_LEFT,
STRAIGHT_RIGHT,
ROTATE_LEFT,
ROTATE_RIGHT
} |
Public Member Functions |
|
| Rovio (OptionManager &mgr, const std::string &descrName="Rovio", const std::string &tagName="Rovio") |
| void | start2 () |
| | This is called from within start() after the subcomponents have started.
|
| bool | stop () |
| | Stop the robot.
|
| bool | moveForward (float speed) |
| | Move the robot forward by speed. Speed is nomalized from 0 to 1.
|
| bool | moveBackward (float speed) |
| | Move the robot forward by speed. Speed is nomalized from 0 to 1.
|
| bool | straightLeft (float speed) |
| | Move the robot forward by speed. Speed is nomalized from 0 to 1.
|
| bool | straightRight (float speed) |
| | Move the robot forward by speed. Speed is nomalized from 0 to 1.
|
| bool | rotateLeft (float speed) |
| | Move the robot forward by speed. Speed is nomalized from 0 to 1.
|
| bool | rotateRight (float speed) |
| | Move the robot forward by speed. Speed is nomalized from 0 to 1.
|
| bool | getStatus () |
| | Ge the Robot Status.
|
| bool | setCameraPos (int pos) |
| | Set the camera position.
|
| bool | playSound () |
| | Play sound.
|
Protected Member Functions |
|
bool | sendDriveRequest (DRIVE_PARAMS dValue, float speed) |
| virtual void | stop2 () |
| | This is called from within stop() after the subcomponents have stopped.
|
Detailed Description
Definition at line 47 of file Rovio.H.
Member Function Documentation
| bool Rovio::getStatus |
( |
|
) |
|
Ge the Robot Status.
Definition at line 129 of file Rovio.C.
| bool Rovio::moveBackward |
( |
float |
speed |
) |
|
Move the robot forward by speed. Speed is nomalized from 0 to 1.
Definition at line 80 of file Rovio.C.
| bool Rovio::moveForward |
( |
float |
speed |
) |
|
Move the robot forward by speed. Speed is nomalized from 0 to 1.
Definition at line 74 of file Rovio.C.
| bool Rovio::playSound |
( |
|
) |
|
Play sound.
Definition at line 166 of file Rovio.C.
References in.
| bool Rovio::rotateLeft |
( |
float |
speed |
) |
|
Move the robot forward by speed. Speed is nomalized from 0 to 1.
Definition at line 98 of file Rovio.C.
| bool Rovio::rotateRight |
( |
float |
speed |
) |
|
Move the robot forward by speed. Speed is nomalized from 0 to 1.
Definition at line 104 of file Rovio.C.
| bool Rovio::setCameraPos |
( |
int |
pos |
) |
|
Set the camera position.
Definition at line 140 of file Rovio.C.
| void Rovio::start2 |
( |
|
) |
[virtual] |
| void Rovio::stop2 |
( |
|
) |
[protected, virtual] |
This is called from within stop() after the subcomponents have stopped.
Reimplemented from ModelComponent.
Definition at line 63 of file Rovio.C.
| bool Rovio::straightLeft |
( |
float |
speed |
) |
|
Move the robot forward by speed. Speed is nomalized from 0 to 1.
Definition at line 86 of file Rovio.C.
| bool Rovio::straightRight |
( |
float |
speed |
) |
|
Move the robot forward by speed. Speed is nomalized from 0 to 1.
Definition at line 92 of file Rovio.C.
The documentation for this class was generated from the following files:

 1.6.3
1.6.3