
Public Member Functions | |
| SupplementaryMotorAreaI (OptionManager &mgr, const std::string &descrName="SupplementaryMotorArea", const std::string &tagName="SupplementaryMotorArea") | |
| virtual void | run () |
| void | evolve () |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a gps message and compute the location. | |
| void | init (Ice::CommunicatorPtr ic, Ice::ObjectAdapterPtr adapter) |
| Initalize the object. | |
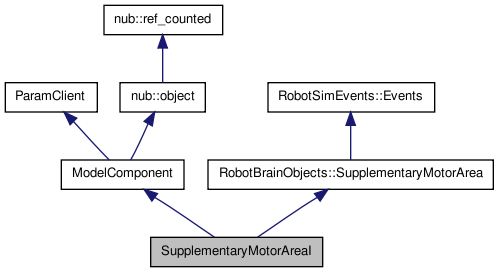
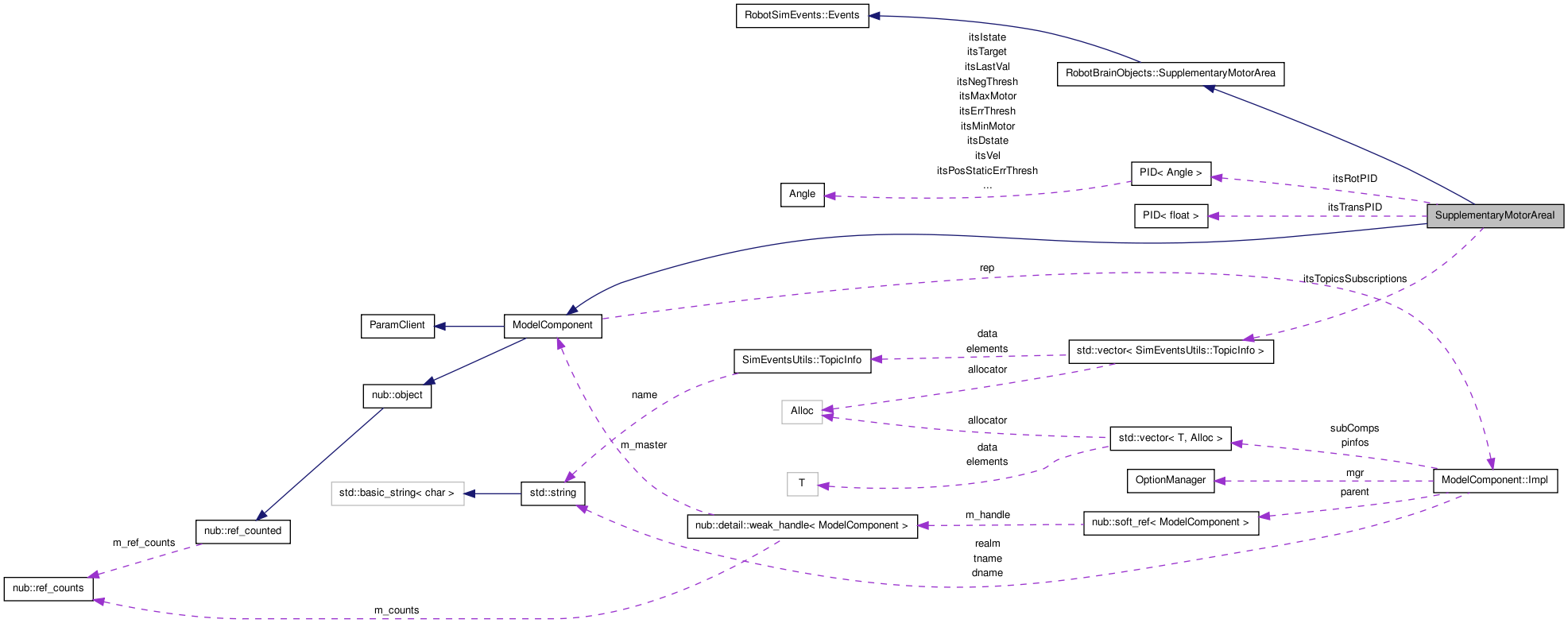
Definition at line 60 of file SupplementaryMotorAreaI.H.
| void SupplementaryMotorAreaI::init | ( | Ice::CommunicatorPtr | ic, | |
| Ice::ObjectAdapterPtr | adapter | |||
| ) |
Initalize the object.
Definition at line 85 of file SupplementaryMotorAreaI.C.
| void SupplementaryMotorAreaI::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a gps message and compute the location.
Definition at line 126 of file SupplementaryMotorAreaI.C.
 1.6.3
1.6.3