
A behaviour for maintaining pose history and dumping it to a file every now and then. More...
#include <Robots/LoBot/control/LoTrack.H>
Friends | |
| class | subfactory< Track, base > |
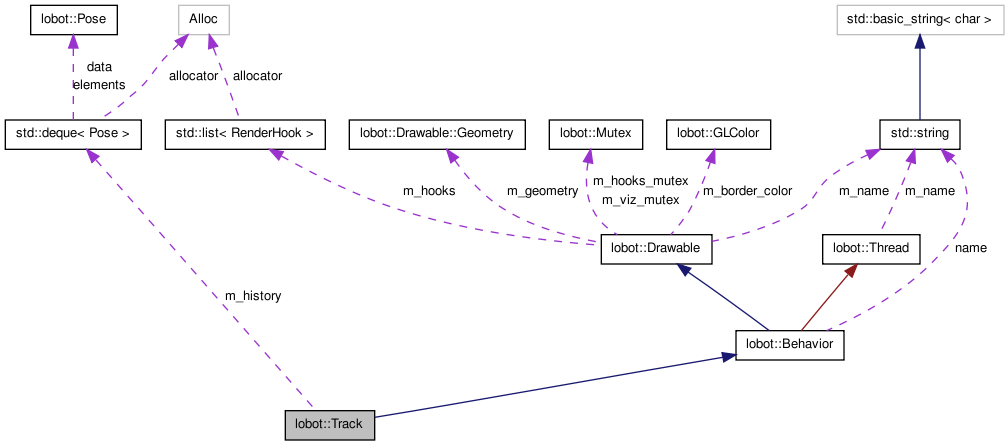
A behaviour for maintaining pose history and dumping it to a file every now and then.
This class implements a behaviour for tracking the robot's pose history and visualizing the recent poses as a dotted trail behind the robot's icon on the map drawing area. Each pose update is also logged to the metrics log. Additionally, the robot's current speed is also logged by this behaviour.
This behaviour does not control the robot in any way; it is only meant for data collection and visualization.
Definition at line 80 of file LoTrack.H.
 1.6.3
1.6.3