
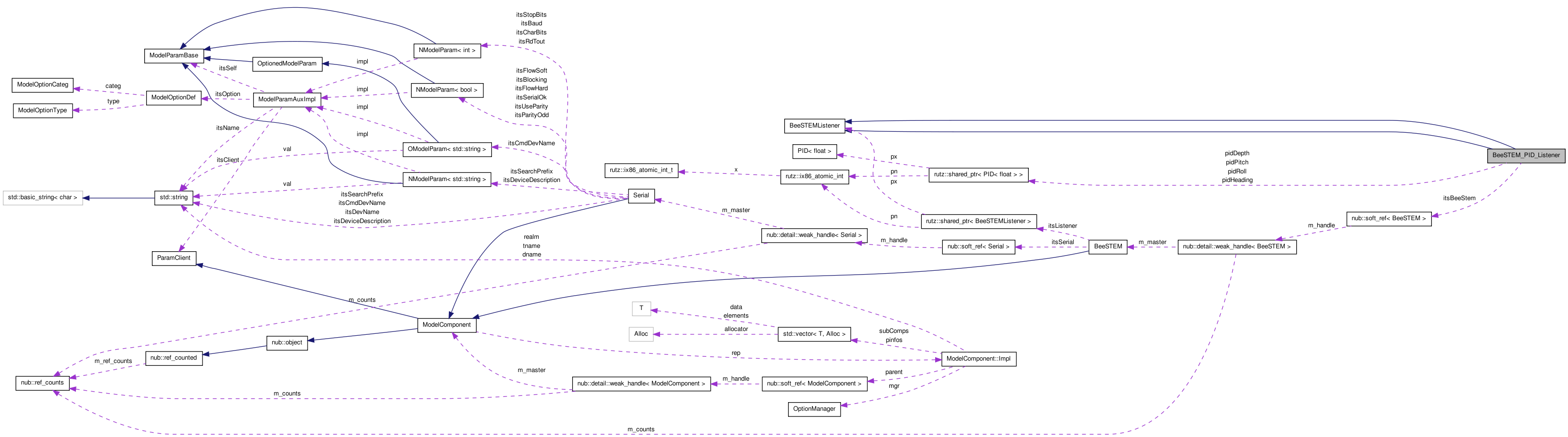
Our own little BeeSTEMListener. More...
Public Member Functions | |
| BeeSTEM_PID_Listener (nub::soft_ref< BeeSTEM > &b) | |
| void | setTargetHeading (int _h) |
| void | setTargetPitch (int _h) |
| void | disableHeadingTarget () |
| void | disablePitchTarget () |
| void | setPrintOnly (bool b) |
| int | getPos () |
| virtual void | event (const BeeSTEMEventType t, const unsigned char dat1, const unsigned char dat2) |
| An event was received. | |
| BeeSTEM_PID_Listener (nub::soft_ref< BeeSTEM > &b) | |
| void | setTargetHeading (int _h) |
| void | setTargetPitch (int _h) |
| void | disableHeadingTarget () |
| void | disablePitchTarget () |
| void | setPrintOnly (bool b) |
| int | getPos () |
| virtual void | event (const BeeSTEMEventType t, const unsigned char dat1, const unsigned char dat2) |
| An event was received. | |
Our own little BeeSTEMListener.
Definition at line 103 of file test-SeaBeeInterface.C.
| virtual void BeeSTEM_PID_Listener::event | ( | const BeeSTEMEventType | t, | |
| const unsigned char | dat1, | |||
| const unsigned char | dat2 | |||
| ) | [inline, virtual] |
An event was received.
This function will be called by the BeeSTEM once you have registered your BeeSTEMListener derivative with the BeeSTEM using BeeSTEM::setListener(). Beware that the call to event() will be from a thread running in the BeeSTEM and thus will operate in parallel with your main thread and main loop. See test-BeeSTEM.C for an example of how to synchronize a main loop with these asynchronous event calls. The following data will be passed along with the event type:
_type______________________dat1__________________dat2_
COMPASS_HEADING heading 0
COMPASS_PITCH pitch 0
COMPASS_ROLL roll 0
ACCEL_X x-acceleration 0
ACCEL_Y y-acceleration 0
INT_PRESS internal pressure 0
EXT_PRESS external pressure 0
TEMP1 temperature 1 0
TEMP2 temperature 2 0
TEMP3 temperature 3 0
DIG_IN digital input byte 0
ADC_IN spare adc value 0
MOTOR_CURR current motor number
All Others 0 0
Implements BeeSTEMListener.
Definition at line 171 of file test-TunePID.C.
References rutz::shared_ptr< T >::is_valid().
| virtual void BeeSTEM_PID_Listener::event | ( | const BeeSTEMEventType | t, | |
| const unsigned char | dat1, | |||
| const unsigned char | dat2 | |||
| ) | [inline, virtual] |
An event was received.
This function will be called by the BeeSTEM once you have registered your BeeSTEMListener derivative with the BeeSTEM using BeeSTEM::setListener(). Beware that the call to event() will be from a thread running in the BeeSTEM and thus will operate in parallel with your main thread and main loop. See test-BeeSTEM.C for an example of how to synchronize a main loop with these asynchronous event calls. The following data will be passed along with the event type:
_type______________________dat1__________________dat2_
COMPASS_HEADING heading 0
COMPASS_PITCH pitch 0
COMPASS_ROLL roll 0
ACCEL_X x-acceleration 0
ACCEL_Y y-acceleration 0
INT_PRESS internal pressure 0
EXT_PRESS external pressure 0
TEMP1 temperature 1 0
TEMP2 temperature 2 0
TEMP3 temperature 3 0
DIG_IN digital input byte 0
ADC_IN spare adc value 0
MOTOR_CURR current motor number
All Others 0 0
Implements BeeSTEMListener.
Definition at line 170 of file test-SeaBeeInterface.C.
References rutz::shared_ptr< T >::is_valid().
 1.6.3
1.6.3