
Input sources wrapper for Lobot/Robolocust project. More...
#include <Robots/LoBot/io/LoInputSource.H>
Public Member Functions | |
| InputSource (ImageSource< PixelType > *) | |
| InputSource (LaserRangeFinder *) | |
| bool | using_video () const |
| Returns true if the input source is configured to use video. | |
| bool | using_laser () const |
| Returns true if the input source is configured to use laser. | |
| Dims | get_image_size () const |
| GrayImage | get_grayscale_image () const |
| range< int > | lrf_angular_range () const |
| int | get_distance (int angle) const |
| ~InputSource () | |
| Clean-up. | |
| float | average_distance (int min, int max) const |
| float | average_distance (const range< int > &R) const |
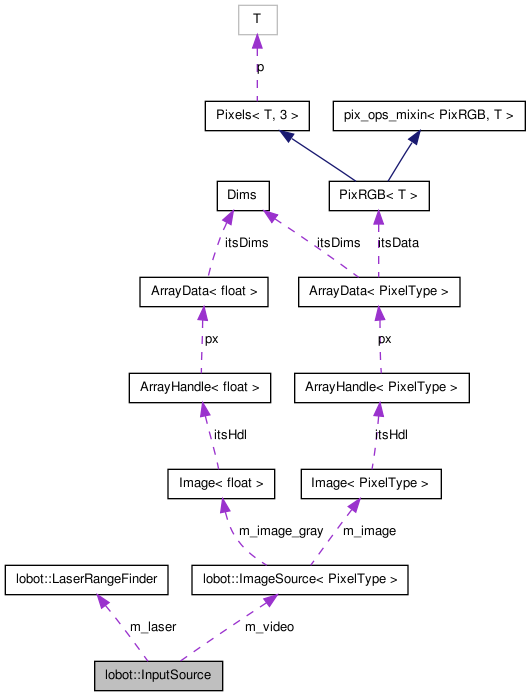
Input sources wrapper for Lobot/Robolocust project.
This class wraps around lobot::ImageSource and lobot::LaserRangeFinder so that its clients need only worry about interfacing with this one class instead of having to mess around with the APIs of many different classes.
Definition at line 78 of file LoInputSource.H.
| lobot::InputSource::InputSource | ( | ImageSource< PixelType > * | is | ) |
This constructor sets up an input source to read from an image source (either FireWire cameras or MPEG files). Usually, if there are multiple cameras or MPEGs involved, the image source will be set up to combine these multiple input images into a single image.
Definition at line 57 of file LoInputSource.C.
| lobot::InputSource::InputSource | ( | LaserRangeFinder * | lrf | ) |
This constructor sets up the laser range finder as the input source.
Definition at line 63 of file LoInputSource.C.
| lobot::InputSource::~InputSource | ( | ) |
Clean-up.
Definition at line 109 of file LoInputSource.C.
| float lobot::InputSource::average_distance | ( | int | min, | |
| int | max | |||
| ) | const |
Return the average distance in an angular range. Throw an exception if the input source is not the laser range finder.
Definition at line 100 of file LoInputSource.C.
References lobot::LaserRangeFinder::average_distance().
| int lobot::InputSource::get_distance | ( | int | angle | ) | const |
Return the distance reading corresponding to the supplied angle. Throw an exception if the input source is not the laser range finder.
Definition at line 93 of file LoInputSource.C.
References lobot::LaserRangeFinder::get_distance().
| GrayImage lobot::InputSource::get_grayscale_image | ( | ) | const |
Return the grayscale version of the input image. Throws an exception if the input source is not a video stream.
Definition at line 77 of file LoInputSource.C.
| Dims lobot::InputSource::get_image_size | ( | ) | const |
Return the size of the input image if the input really is a video source; throw an exception otherwise.
Definition at line 70 of file LoInputSource.C.
| range< int > lobot::InputSource::lrf_angular_range | ( | ) | const |
Return the angular range of the laser range finder. Throw an exception if the input source is not the laser range finder.
Definition at line 86 of file LoInputSource.C.
References lobot::LaserRangeFinder::get_angular_range().
| bool lobot::InputSource::using_laser | ( | ) | const [inline] |
Returns true if the input source is configured to use laser.
Definition at line 103 of file LoInputSource.H.
| bool lobot::InputSource::using_video | ( | ) | const [inline] |
Returns true if the input source is configured to use video.
Definition at line 100 of file LoInputSource.H.
 1.6.3
1.6.3