
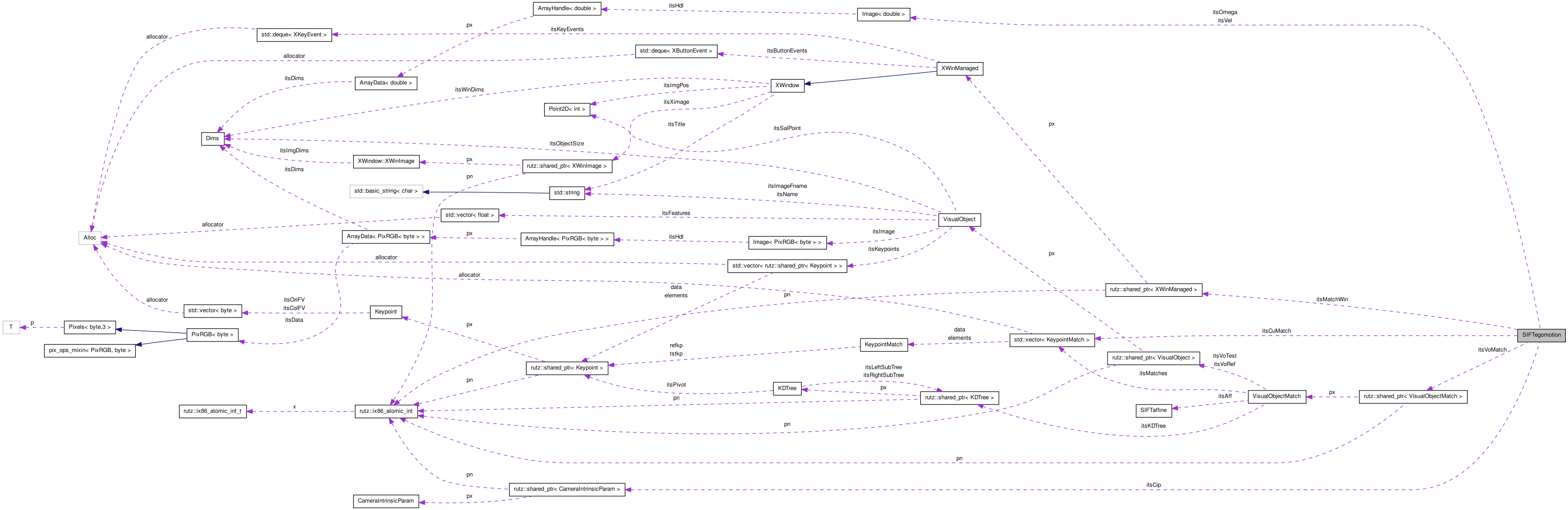
A class that calculates 3D egomotion from a set of matches. More...
#include <SIFT/SIFTegomotion.H>
Public Member Functions | |
| SIFTegomotion (rutz::shared_ptr< VisualObjectMatch > match, rutz::shared_ptr< CameraIntrinsicParam > cip=rutz::shared_ptr< CameraIntrinsicParam >(), rutz::shared_ptr< XWinManaged > matchWin=rutz::shared_ptr< XWinManaged >()) | |
| Constructor. | |
| Image< double > | getItsVel () const |
| Image< double > | getItsOmega () const |
| void | print (Image< double > img, const std::string &name="name") |
A class that calculates 3D egomotion from a set of matches.
Definition at line 48 of file SIFTegomotion.H.
| SIFTegomotion::SIFTegomotion | ( | rutz::shared_ptr< VisualObjectMatch > | match, | |
| rutz::shared_ptr< CameraIntrinsicParam > | cip = rutz::shared_ptr<CameraIntrinsicParam>(), |
|||
| rutz::shared_ptr< XWinManaged > | matchWin = rutz::shared_ptr<XWinManaged>() | |||
| ) |
Constructor.
Definition at line 121 of file SIFTegomotion.C.
 1.6.3
1.6.3