
The main window for the laser range finder's test program. More...
#include <Robots/LoBot/ui/LoLaserWindow.H>
Classes | |
| class | Params |
Static Public Member Functions | |
| static void | create (const std::string &) |
Friends | |
| class | singleton< LaserWindow > |
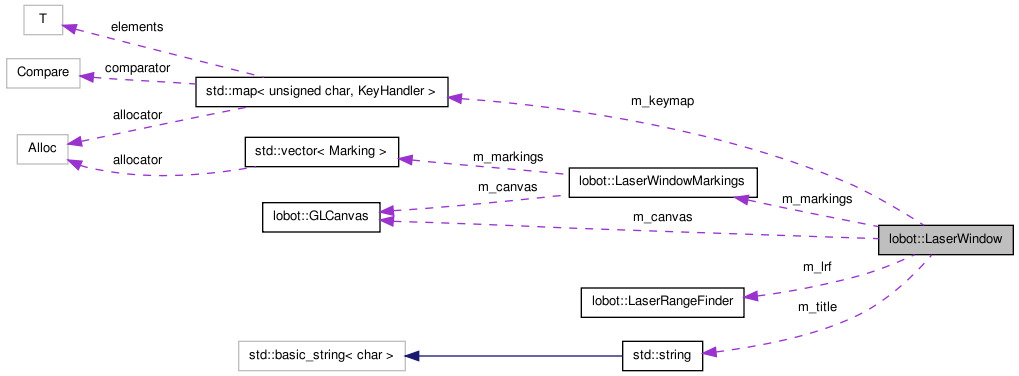
The main window for the laser range finder's test program.
This class uses GLUT and OpenGL to encapsulate a visualization window for the Hokuyo laser range finder's distance measurements. A world coordinate system is setup to match the maximum range of the laser range finder and the device itself is depicted as a small triangle centered at the origin of the world coordinate system. A grid is overlaid on the world coordinate system with cells at regular intervals and the distance measurements are shown as rays emanating from the central triangle in each supported direction.
The user may tweak various parameters such as grid spacing, measurement ray directions, etc. Zoom and pan are also supported.
Definition at line 87 of file LoLaserWindow.H.
| void lobot::LaserWindow::create | ( | const std::string & | title | ) | [static] |
Because of the weird way in which GLUT is structured, clients only need this one method to use this class. Everything else is handled internally (meaning everything else in this class is private).
Definition at line 99 of file LoLaserWindow.C.
 1.6.3
1.6.3