
Classes | |
| struct | JointPos |
Public Member Functions | |
Constructors and Destructors | |
| ArmController (OptionManager &mgr, const std::string &descrName="ArmController", const std::string &tagName="ArmController", nub::soft_ref< RobotArm > robotArm=nub::soft_ref< RobotArm >()) | |
| Constructor. | |
| ~ArmController () | |
| Destructor. | |
| bool | setBasePos (int base, bool rel=false) |
| bool | setSholderPos (int sholder, bool rel=false) |
| bool | setElbowPos (int elbow, bool rel=false) |
| bool | setWrist1Pos (int wrist1, bool rel=false) |
| bool | setWrist2Pos (int wrist2, bool rel=false) |
| bool | setSpeed (int speed) |
| void | setGripper (int pos) |
| void | start2 () |
| This is called from within start() after the subcomponents have started. | |
| int | getElbow () |
| int | getElbowErr () |
| int | getBase () |
| int | getSholder () |
| int | getWrist1 () |
| int | getWrist2 () |
| bool | getKillSwitch () |
| void | setMotor (int motor, int val) |
| const int * | getBasePtr () |
| const int * | getSholderPtr () |
| const int * | getElbowPtr () |
| const int * | getWrist1Ptr () |
| const int * | getWrist2Ptr () |
| const int * | getMotor_Base_Ptr () |
| const int * | getMotor_Sholder_Ptr () |
| const int * | getMotor_Elbow_Ptr () |
| const int * | getMotor_Wrist1_Ptr () |
| const int * | getMotor_Wrist2_Ptr () |
| nub::soft_ref< RobotArm > | getRobotArm () |
| void | setMotorsOn (bool val) |
| void | setPidOn (bool val) |
| void | setControllerOn (bool val) |
| bool | isControllerOn () |
| void | updateBase (int currentBase) |
| void | updateSholder (int currentSholder) |
| void | updateElbow (unsigned int currentElbow) |
| void | updateWrist1 (unsigned int currentWrist1) |
| void | updateWrist2 (unsigned int currentWrist2) |
| void | updatePID () |
| void | sendHeartBeat () |
| bool | isFinishMove () |
| Wait until all joint finish move. | |
| JointPos | getJointPos () |
| Get the joint positions. | |
| void | resetJointPos (JointPos &jointPos, int val=0) |
| Reset the joint positions to a particuler val. | |
| bool | setJointPos (const JointPos &jointPos, bool block=true) |
| Set the joint positions. | |
| void | setMinJointPos (const JointPos &jointPos) |
| Set the min joint positions. | |
| void | setMaxJointPos (const JointPos &jointPos) |
| Set the max joint positions. | |
| void | killMotors () |
| Stop all motors. | |
| void | genPIDImage () |
| const Image< PixRGB< byte > > * | getPIDImagePtr () |
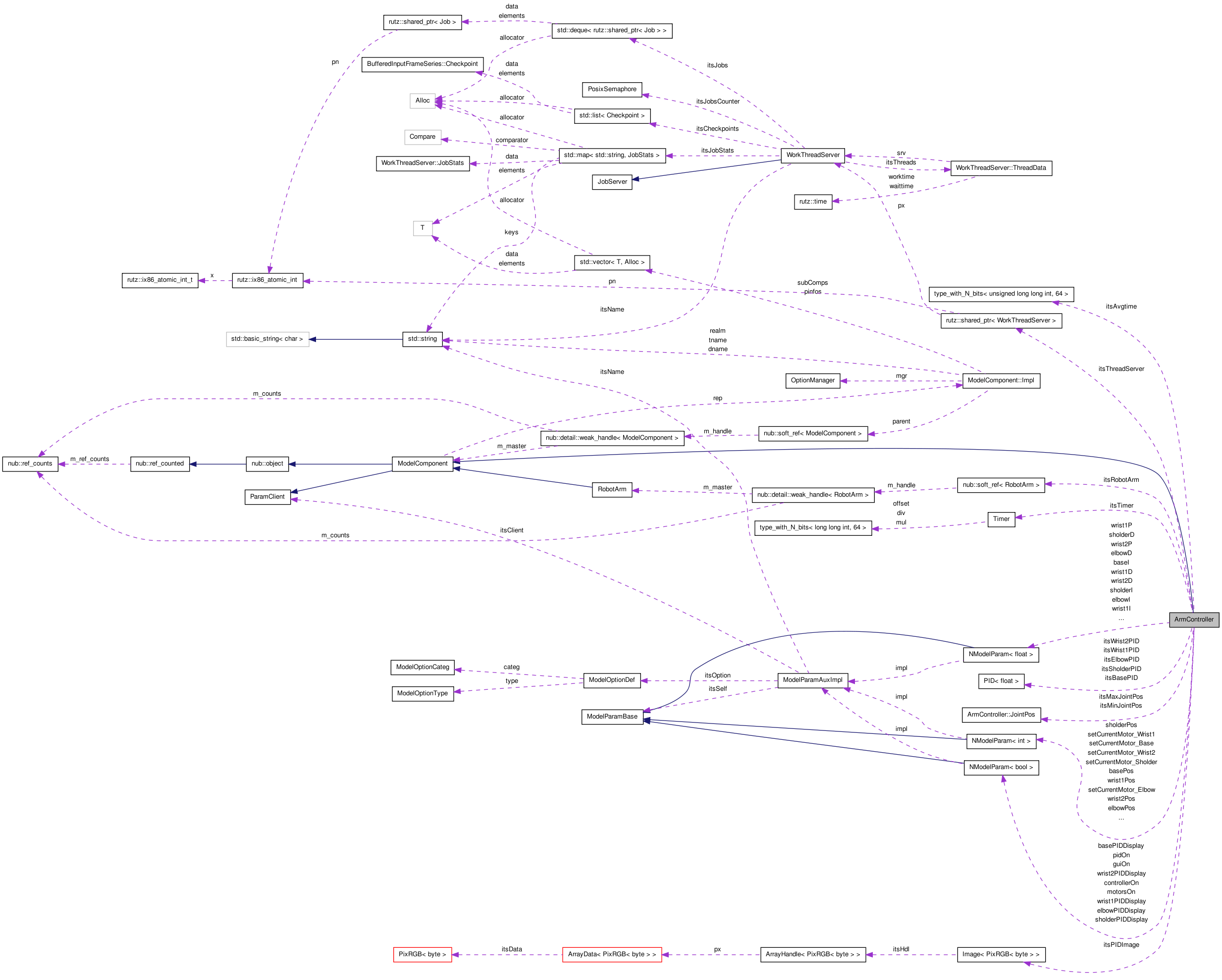
Definition at line 59 of file ArmController.H.
| ArmController::ArmController | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "ArmController", |
|||
| const std::string & | tagName = "ArmController", |
|||
| nub::soft_ref< RobotArm > | robotArm = nub::soft_ref<RobotArm>() | |||
| ) |
Constructor.
Definition at line 85 of file ArmController.C.
References ModelComponent::addSubComponent().
| ArmController::~ArmController | ( | ) |
| ArmController::JointPos ArmController::getJointPos | ( | ) |
Get the joint positions.
Definition at line 325 of file ArmController.C.
| bool ArmController::isFinishMove | ( | ) |
Wait until all joint finish move.
Definition at line 338 of file ArmController.C.
References abs().
Referenced by setJointPos().
| void ArmController::killMotors | ( | ) |
Stop all motors.
Definition at line 561 of file ArmController.C.
References NModelParam< T >::setVal().
Referenced by start2(), and ~ArmController().
| void ArmController::resetJointPos | ( | JointPos & | jointPos, | |
| int | val = 0 | |||
| ) |
Reset the joint positions to a particuler val.
Definition at line 402 of file ArmController.C.
| bool ArmController::setJointPos | ( | const JointPos & | jointPos, | |
| bool | block = true | |||
| ) |
| void ArmController::setMaxJointPos | ( | const JointPos & | jointPos | ) |
Set the max joint positions.
Definition at line 362 of file ArmController.C.
| void ArmController::setMinJointPos | ( | const JointPos & | jointPos | ) |
Set the min joint positions.
Definition at line 350 of file ArmController.C.
| void ArmController::start2 | ( | ) | [virtual] |
This is called from within start() after the subcomponents have started.
Reimplemented from ModelComponent.
Definition at line 196 of file ArmController.C.
References killMotors(), and rutz::shared_ptr< T >::reset().
 1.6.3
1.6.3