![]()
Towards Visually-Guided Neuromorphic Robots
| Home |
| Overview |
| News |
| Hardware |
| Software |
| Gallery |
| Downloads |
| Team |
| Publications |
| Sponsors |
| Links |

The Beobot Code
|
Saliency - Visual Attention System The Saliency algorithm is a bottom-up visual attention system. It simulates an ability in humans to discern attractive elements of a visual scene. When given an image, the algorithm will pick out locations of interest and direct the AI's attention towards the spot. You can read more about the Saliency model HERE. The Saliency algorithm, in theory, should enable the Beobot to focus on important obstacles ahead such as cones, pedestrians, rocks and walls. After that, the objects picked out can be recognized and grouped. The AI will then decide what to do - in most cases steer clear to avoid collision. |
|
Object Recognition The object recognition algorithm is still a work in progress. Once incorporated, it is hoped to allow the Beobot to recognize objects in the visual input. Knowing what lies ahead will allow the Beobot to react properly. |
|
Scene-based Question-Aswering System The next step in object recognition is a scene-based question answering system. The motivation is to allow the Beobot to focus its attention on objects that are most relevant to it. It is unreasonable for any AI to try to recognize all objects in its sights. When a question is asked (eg. what should I avoid?), scene-based QA would immediately filter out objects that have no relevance (track, grass, etc) and let the Beobot work on those that do (people, trees, walls, etc). |
|
|
|
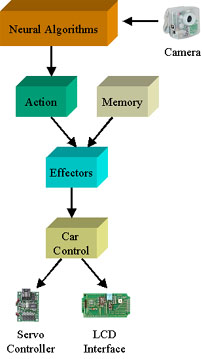
Action/Memory AI The AI system of the Beobot will eventually rely on neural algorithms to provide scene analysis and object recognition. When the neural software (brain) parses a scene, the Action/Memory AI system will then make a decision based on the information obtained. The decision is sent to the Effectors interface. The Effectors and Car Control module in turn control the truck (steering, speed, gear, LCD display) via the Servo Controller and the LCD interface. |