
Related Publications
This set of data is used in the following publications:
- IROS 2010: Mobile Robot Vision Navigation & Localization Using Gist and Saliency
Using Features Shared with Visual Attention
- IROS 2012: Mobile Robot Monocular Vision Navigation Based on Road Region and Boundary Estimation
- VSS 2010: Hardware and software computing architecture for robotics applications of neuroscience-inspired vision and navigation algorithms
- VSS 2011: Mobile Robot vision navigation and obstacle avoidance based on gist and saliency algorithms
- VSS 2012: Mobile Robot Monocular Vision Navigation Based on Road Region and Boundary Estimation



Dataset
There are four outdoor and one indoor sites on the USC campus:
- 1. Hedco Neurosciences Building(HNB) indoor
- 2. Associate and Founders Park (AnF) outdoor
- 3. Hellman Way (HWY) outdoor
- 4. Viterbi School Engineering Quad (Equad) outdoor
- 5. USC Seaver Science Library (SSL) outdoor
These sites are selected because they present a different challange
visually: a human made building complex, a park full of trees, and an
open field area. The sites can be viewed in the following map (figure
1).
View RoadFinder in a larger map

Figure 1. Map of testing sites
The data is taken using a camera mounted on the robot.
Selection of filming times that include all lighting conditions is the
main issue in collecting training samples. Because lighting space is
hard to gauge, it takes several days to come up with times of day to
cover most of them. At the end settle on the following times: early
morning, noon, early afternoon, late afternoon, and early evening. We
do not include the night time videos because some sites are simply too
dark.
Hedco Neurosciences Building(HNB) indoor
The ACB scenes (shown in figure 2) are filmed throughout the narrow
corridors of the building complex. Most of the surroundings are flat
walls with little texture and solid lines that delineate the walls and
different parts of the buildings.
 |
 |
| Figure 2. Map and example images of the ACB site |
Figure 3 shows the different lighting conditions tested, from left
to right: late afternoon (trial 1), early evening with lights already
turned on (trial 2), mid-afternoon (trial 3), and noon (trial 4).
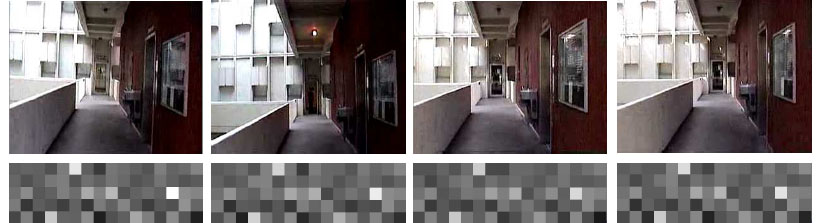
Figure 3. Lighting conditions for the ACB site testing
The entire ACB data in one .tar file: ACB.tar.gz
Associate and Founder's Park (AnF)
The scenes of AnF (figure 4), are dominated by vegetations.
There are fewer extractable structures as large areas of the images
are practically un-segmentable as leaves overrun most regions. In
addition, the length of the segments at this site are about twice the
lengths of the segments in ACB.
 |
 |
| Figure 4. Map and example images of the AnF site |
Figure 5 shows the different lighting conditions tested, from left to right: overcast (trial 1), early evening with lights
already turned on (trial 2), mid-afternoon (trial 3), and noon
(trial 4).

Figure 5. Lighting conditions for the AnF site testing
The entire AnFpark data in one .tar
file: AnFpark.tar.gz
Frederick D. Fagg (FDF)
A large portion of the FDF site (figure 6) is sky, mostly textureless
space with scattered light clouds. The main reason for testing at this
site is to assess the gist response on sparser data. The length of the
segments are about 50 percent longer than the ones in the second
experiment (three times that of ACB).
 |
 |
| Figure 6. Map and example images of the FDF site |
Figure 7 shows the different lighting conditions tested,from left
to right: early evening (street lights are off), early evening (street
lights are already on), noon, and middle of afternoon, with the
dramatic long shadow cast on the field by a tall building.
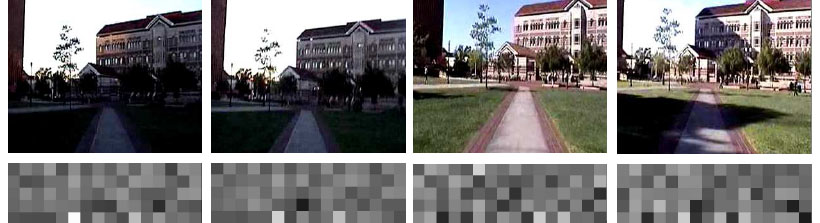
Figure 7. Lighting conditions for the FDF site testing
The entire FDFpark data in one .tar file: FDFpark.tar.gz
Copyright © 2000 by the University of
Southern California, iLab and Prof. Laurent Itti


