
Class for interfacing with the IMU. More...
#include <BeoSub/BeoSubIMU.H>
Public Member Functions | |
| BeoSubIMU (OptionManager &mgr, const std::string &descrName="IMU", const std::string &tagName="IMU", const char *dev="/dev/ttyS0") | |
| Initialize. | |
| ~BeoSubIMU () | |
| Destructor. | |
| void | setListener (rutz::shared_ptr< BeoSubIMUListener > listener) |
| Setup a listener that will be called each time new data is received. | |
| float | getXaccel () |
| Get the current X acceleration. | |
| float | getYaccel () |
| Get the current Y acceleration. | |
| float | getZaccel () |
| Get the current Z acceleration. | |
| Angle | getXvel () |
| Get the current X velocity. | |
| Angle | getYvel () |
| Get the current Y velocity. | |
| Angle | getZvel () |
| Get the current Z velocity. | |
| void | run () |
Protected Member Functions | |
| void | start2 () |
| get started | |
| void | stop1 () |
| get stopped | |
| float | accelConvert (int data) |
| float | rateConvert (int data) |
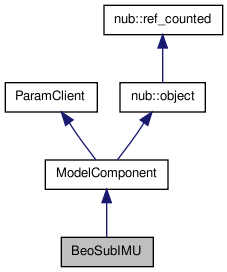
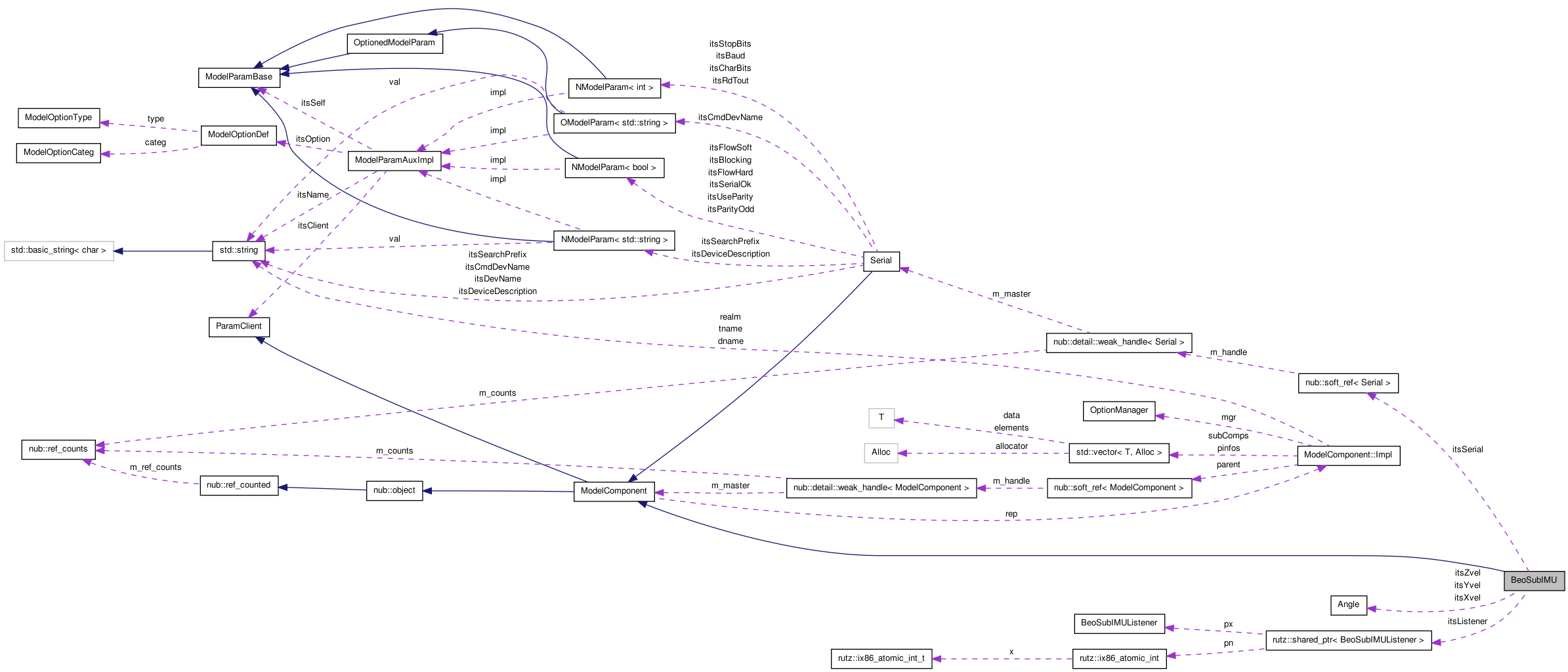
Class for interfacing with the IMU.
This is an IMU. It sends X,Y,Z acceleration and X,Y,Z angular velocity
Definition at line 58 of file BeoSubIMU.H.
| BeoSubIMU::BeoSubIMU | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "IMU", |
|||
| const std::string & | tagName = "IMU", |
|||
| const char * | dev = "/dev/ttyS0" | |||
| ) |
Initialize.
Definition at line 55 of file BeoSubIMU.C.
References ModelComponent::addSubComponent().
| BeoSubIMU::~BeoSubIMU | ( | ) |
Destructor.
Definition at line 82 of file BeoSubIMU.C.
| float BeoSubIMU::getXaccel | ( | ) |
Get the current X acceleration.
Definition at line 168 of file BeoSubIMU.C.
| Angle BeoSubIMU::getXvel | ( | ) |
Get the current X velocity.
Definition at line 195 of file BeoSubIMU.C.
| float BeoSubIMU::getYaccel | ( | ) |
Get the current Y acceleration.
Definition at line 177 of file BeoSubIMU.C.
| Angle BeoSubIMU::getYvel | ( | ) |
Get the current Y velocity.
Definition at line 204 of file BeoSubIMU.C.
| float BeoSubIMU::getZaccel | ( | ) |
Get the current Z acceleration.
Definition at line 186 of file BeoSubIMU.C.
| Angle BeoSubIMU::getZvel | ( | ) |
Get the current Z velocity.
Definition at line 213 of file BeoSubIMU.C.
| void BeoSubIMU::setListener | ( | rutz::shared_ptr< BeoSubIMUListener > | listener | ) |
Setup a listener that will be called each time new data is received.
Definition at line 78 of file BeoSubIMU.C.
| void BeoSubIMU::start2 | ( | ) | [protected, virtual] |
| void BeoSubIMU::stop1 | ( | ) | [protected, virtual] |
 1.6.3
1.6.3