
The attentional guidance map base class. More...
#include <Neuro/AttentionGuidanceMap.H>
Public Member Functions | |
Constructor, destructor, and reset | |
| AttentionGuidanceMap (OptionManager &mgr, const std::string &descrName="Attention Guidance Map", const std::string &tagName="AttentionGuidanceMap") | |
| Ininitialized constructor. | |
| virtual | ~AttentionGuidanceMap () |
| Destructor. | |
| virtual void | reset ()=0 |
| Reset to initial state just after construction. | |
Protected Member Functions | |
| SIMCALLBACK_DECLARE (AttentionGuidanceMap, SimEventSaliencyMapOutput) | |
| Callback for when a new saliency map is available. | |
| SIMCALLBACK_DECLARE (AttentionGuidanceMap, SimEventTaskRelevanceMapOutput) | |
| Callback for when a new task relevance map is available. | |
| SIMCALLBACK_DECLARE (AttentionGuidanceMap, SimEventClockTick) | |
| Callback on every clock tick. | |
| SIMCALLBACK_DECLARE (AttentionGuidanceMap, SimEventSaveOutput) | |
| Callback for every time we should save our outputs. | |
| virtual void | inputBU (const Image< float > &in)=0 |
| Set new bottom-up input. | |
| virtual void | inputTD (const Image< float > &in)=0 |
| Set new top-down input. | |
| virtual Image< float > | getV () const =0 |
| Return all our relevance values as an Image<float> | |
| virtual void | doClockTick (SimEventQueue &q) |
| run on overy time step | |
| virtual void | save1 (const ModelComponentSaveInfo &sinfo) |
| save results | |
Protected Attributes | |
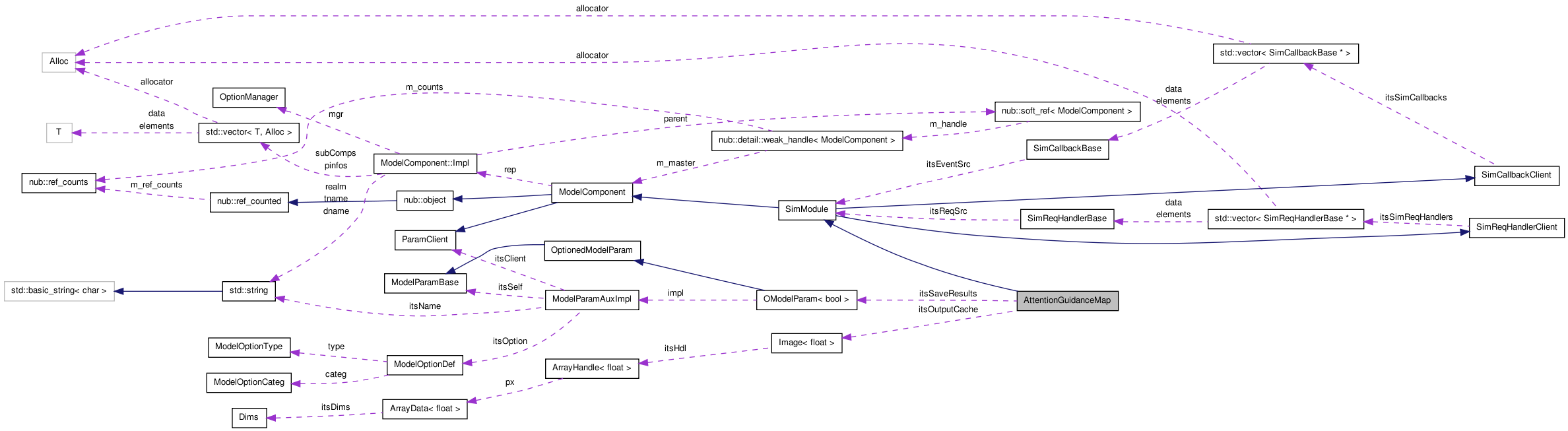
| OModelParam< bool > | itsSaveResults |
| Save our internals when saveResults() is called? | |
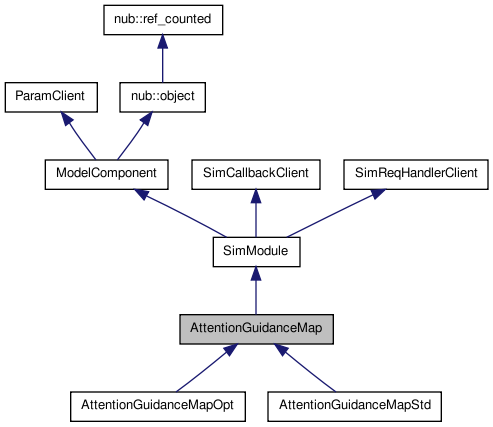
The attentional guidance map base class.
This is a 2D attentional guidance, or priority map. It is just a base class with virtual function definitions. Various implementations are available below. The AGM is a topographic map that represents the priority of spatial locations. Priority is the combination of bottom-up or stimulus driven processing with top-down or goal directed processing. Top-down might also include higher-order elements of visual processing such as object recognition. Smaller values indicate that a location is of low priority while higher values indicate higher priority.
Definition at line 71 of file AttentionGuidanceMap.H.
| AttentionGuidanceMap::AttentionGuidanceMap | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Attention Guidance Map", |
|||
| const std::string & | tagName = "AttentionGuidanceMap" | |||
| ) |
Ininitialized constructor.
The map will be resized and initialized the first time input() is called
Definition at line 65 of file AttentionGuidanceMap.C.
| AttentionGuidanceMap::~AttentionGuidanceMap | ( | ) | [virtual] |
Destructor.
Definition at line 78 of file AttentionGuidanceMap.C.
| void AttentionGuidanceMap::doClockTick | ( | SimEventQueue & | q | ) | [protected, virtual] |
run on overy time step
Definition at line 127 of file AttentionGuidanceMap.C.
References getV(), Image< T >::initialized(), rutz::make_shared(), and SimEventQueue::post().
| virtual Image<float> AttentionGuidanceMap::getV | ( | ) | const [protected, pure virtual] |
Return all our relevance values as an Image<float>
Implemented in AttentionGuidanceMapStd, and AttentionGuidanceMapOpt.
Referenced by doClockTick(), and save1().
| virtual void AttentionGuidanceMap::inputBU | ( | const Image< float > & | in | ) | [protected, pure virtual] |
Set new bottom-up input.
This should initialize and resize the map if it is currently uninitialized (e.g., just after construction or reset()).
Implemented in AttentionGuidanceMapStd, and AttentionGuidanceMapOpt.
| virtual void AttentionGuidanceMap::inputTD | ( | const Image< float > & | in | ) | [protected, pure virtual] |
Set new top-down input.
This should initialize and resize the map if it is currently uninitialized (e.g., just after construction or reset()).
Implemented in AttentionGuidanceMapStd, and AttentionGuidanceMapOpt.
| virtual void AttentionGuidanceMap::reset | ( | ) | [pure virtual] |
Reset to initial state just after construction.
Implemented in AttentionGuidanceMapStd, and AttentionGuidanceMapOpt.
| void AttentionGuidanceMap::save1 | ( | const ModelComponentSaveInfo & | sinfo | ) | [protected, virtual] |
save results
A default implementation is provided, which just calls getV() and saves that map with a file name prefix of "AGM".
| ofs | will figure out file name/format and save our results. |
Reimplemented from ModelComponent.
Definition at line 89 of file AttentionGuidanceMap.C.
References FLOAT_NORM_PRESERVE, getV(), OModelParam< T >::getVal(), itsSaveResults, and SRC_POS.
| AttentionGuidanceMap::SIMCALLBACK_DECLARE | ( | AttentionGuidanceMap | , | |
| SimEventSaveOutput | ||||
| ) | [protected] |
Callback for every time we should save our outputs.
| AttentionGuidanceMap::SIMCALLBACK_DECLARE | ( | AttentionGuidanceMap | , | |
| SimEventClockTick | ||||
| ) | [protected] |
Callback on every clock tick.
| AttentionGuidanceMap::SIMCALLBACK_DECLARE | ( | AttentionGuidanceMap | , | |
| SimEventTaskRelevanceMapOutput | ||||
| ) | [protected] |
Callback for when a new task relevance map is available.
| AttentionGuidanceMap::SIMCALLBACK_DECLARE | ( | AttentionGuidanceMap | , | |
| SimEventSaliencyMapOutput | ||||
| ) | [protected] |
Callback for when a new saliency map is available.
OModelParam<bool> AttentionGuidanceMap::itsSaveResults [protected] |
Save our internals when saveResults() is called?
Definition at line 107 of file AttentionGuidanceMap.H.
Referenced by save1().
 1.6.3
1.6.3