
This class allows for easy access to the list of salient points in an image. More...
#include <Neuro/getSaliency.H>

Public Member Functions | |
| GetSaliency (OptionManager &mgr) | |
| Constructor. | |
| ~GetSaliency () | |
| Destructor. | |
| const int | compute (const Image< PixRGB< byte > > &img, const SimTime &max_time) |
| Compute the table of salient spots. | |
| const Image< float > & | getSalmap () |
| Returns the initial saliency map prior to the evolution. | |
| const std::vector< Point2D < int > > & | getCoords () |
| Returns the coordinates of the salient spots. | |
| const std::vector< SimTime > & | getTimes () |
| Returns the evolution times. | |
| const std::vector< subMap > & | getSubMaps () |
| Returns the submaps. | |
| Image< float > | getVCXmap (const Image< PixRGB< byte > > &img) |
| Return the vc map. | |
Protected Member Functions | |
| SIMCALLBACK_DECLARE (GetSaliency, SimEventWTAwinner) | |
| Callback for when a new attention shift occurs. | |
Protected Attributes | |
| nub::ref< SimEventQueue > | itsQ |
| Image< float > | itsSalmap |
| std::vector< Point2D< int > > | itsCoords |
| std::vector< SimTime > | itsTimes |
| std::vector< subMap > | itsSubMaps |
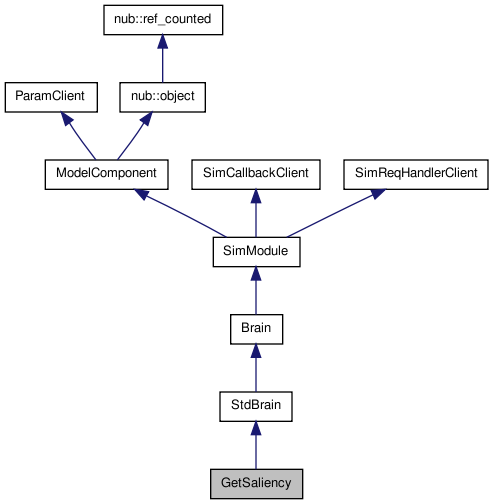
This class allows for easy access to the list of salient points in an image.
It uses the Brain class in order to create a list of the coordinates and evolution times for the salient spots of an image.
Definition at line 60 of file getSaliency.H.
| GetSaliency::GetSaliency | ( | OptionManager & | mgr | ) |
Constructor.
Definition at line 55 of file getSaliency.C.
References ModelComponent::addSubComponent().
| GetSaliency::~GetSaliency | ( | ) |
Destructor.
Definition at line 70 of file getSaliency.C.
Compute the table of salient spots.
Required parameters:
| inp | input color image | |
| targets | binary map of the same size as the input, in which targets for the focus of attention are 255 and the rest is zero. Pass an uninitialized image if you have no targets to look for. |
Definition at line 82 of file getSaliency.C.
| const std::vector< Point2D< int > > & GetSaliency::getCoords | ( | ) |
Returns the coordinates of the salient spots.
Definition at line 112 of file getSaliency.C.
| const Image< float > & GetSaliency::getSalmap | ( | ) |
Returns the initial saliency map prior to the evolution.
Should be called after compute.
Definition at line 108 of file getSaliency.C.
| const std::vector< subMap > & GetSaliency::getSubMaps | ( | ) |
Returns the submaps.
Definition at line 120 of file getSaliency.C.
References downSize(), NamedImage< T >::name(), rescale(), and Dims::w().
| const std::vector< SimTime > & GetSaliency::getTimes | ( | ) |
Returns the evolution times.
double numbers that contains the evolution times for the salient spots. Definition at line 116 of file getSaliency.C.
Return the vc map.
Definition at line 146 of file getSaliency.C.
References InputFrame::fromRgb(), rutz::make_shared(), and SEQ_ANY.
| GetSaliency::SIMCALLBACK_DECLARE | ( | GetSaliency | , | |
| SimEventWTAwinner | ||||
| ) | [protected] |
Callback for when a new attention shift occurs.
 1.6.3
1.6.3