
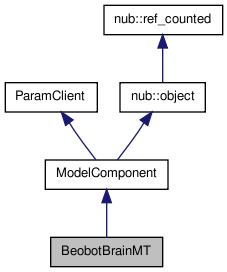
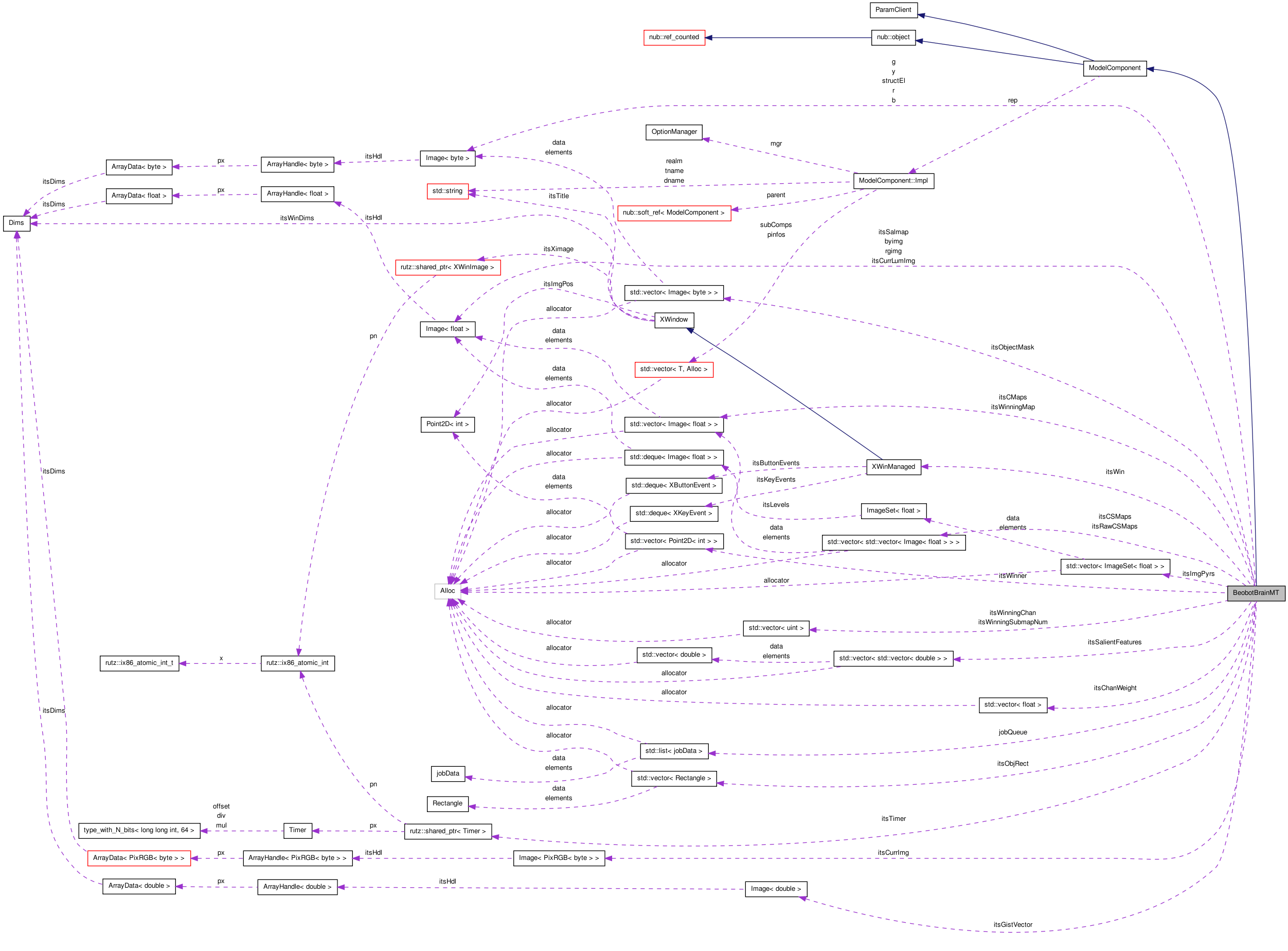
#include <Beobot/BeobotBrainMT.H>
Public Member Functions | |
Constructors and Destructors | |
| BeobotBrainMT (OptionManager &mgr, const std::string &descrName="Beobot Brain MT", const std::string &tagName="BeobotBrainMT") | |
| Constructor. | |
| virtual | ~BeobotBrainMT () |
| Destructor. | |
Access functions | |
| int | getWinChan (uint i) |
| get the winning channel | |
| int | getWinSubmapNum (uint i) |
| get the winning submap number | |
| Image< PixRGB< byte > > | getCurrImage () |
| Get last inputted image. | |
| Image< float > | getCurrCMap (uint cnum) |
| Get current conspicuity image. | |
| Point2D< int > | getSalPoint (uint i) |
| get salient point for object i | |
| void | getFeatures (Point2D< int > p, std::vector< double > &v) |
| get the pre-attentive feature vector of the passed in coordinate | |
| Rectangle | getObjRect (uint i) |
| get the bounding box for object i | |
| void | getSalientFeatures (uint i, std::vector< double > &v) |
| get the salient features for object i | |
| float | getProcessTime () |
| get the time it takes to produce the gist and saliency features | |
| Image< double > | getGist () |
| Get last computed Gist Vector. | |
| Image< float > | getSalMap () |
| Get last computed Saliency Map. | |
member functions | |
| void | input (const Image< PixRGB< byte > > img) |
| Setup up with image to be processed and build the job queue. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| void | threadCompute () |
| For internal thread use: Compute a conspicuity map from an image. | |
| int | getNumSalPoint () |
| get number of objects found in current image | |
Protected Member Functions | |
| void | start1 () |
| get started | |
| void | stop2 () |
| get stopped | |
Brain of a Beobot this is not derived from Brain specifically used for the Beobot system
Definition at line 116 of file BeobotBrainMT.H.
| BeobotBrainMT::BeobotBrainMT | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Beobot Brain MT", |
|||
| const std::string & | tagName = "BeobotBrainMT" | |||
| ) |
Constructor.
Definition at line 65 of file BeobotBrainMT.C.
References drawDisk(), NO_INIT, rutz::shared_ptr< T >::reset(), and ZEROS.
| BeobotBrainMT::~BeobotBrainMT | ( | ) | [virtual] |
Destructor.
Definition at line 158 of file BeobotBrainMT.C.
Get last inputted image.
Definition at line 308 of file BeobotBrainMT.H.
| void BeobotBrainMT::getFeatures | ( | Point2D< int > | p, | |
| std::vector< double > & | v | |||
| ) |
get the pre-attentive feature vector of the passed in coordinate
| Image< double > BeobotBrainMT::getGist | ( | ) |
Get last computed Gist Vector.
Definition at line 242 of file BeobotBrainMT.C.
| int BeobotBrainMT::getNumSalPoint | ( | ) | [inline] |
get number of objects found in current image
Definition at line 320 of file BeobotBrainMT.H.
get the bounding box for object i
Definition at line 326 of file BeobotBrainMT.H.
References ASSERT.
| float BeobotBrainMT::getProcessTime | ( | ) | [inline] |
get the time it takes to produce the gist and saliency features
Definition at line 337 of file BeobotBrainMT.H.
| void BeobotBrainMT::getSalientFeatures | ( | uint | i, | |
| std::vector< double > & | v | |||
| ) | [inline] |
get the salient features for object i
Definition at line 329 of file BeobotBrainMT.H.
References ASSERT.
| Image< float > BeobotBrainMT::getSalMap | ( | ) |
Get last computed Saliency Map.
Definition at line 230 of file BeobotBrainMT.C.
| int BeobotBrainMT::getWinChan | ( | uint | i | ) | [inline] |
| int BeobotBrainMT::getWinSubmapNum | ( | uint | i | ) | [inline] |
Setup up with image to be processed and build the job queue.
Definition at line 181 of file BeobotBrainMT.C.
References rutz::shared_ptr< T >::reset().
| bool BeobotBrainMT::outputReady | ( | ) |
Is the last given input done processing?
Definition at line 162 of file BeobotBrainMT.C.
References Image< T >::initialized().
| void BeobotBrainMT::start1 | ( | ) | [protected, virtual] |
| void BeobotBrainMT::stop2 | ( | ) | [protected, virtual] |
| void BeobotBrainMT::threadCompute | ( | ) |
For internal thread use: Compute a conspicuity map from an image.
Definition at line 254 of file BeobotBrainMT.C.
References buildPyrGaussian(), buildPyrOriented(), centerSurround(), Gaussian5, rutz::shared_ptr< T >::get(), Image< T >::getHeight(), getMinMax(), getRGBY(), getSubSum(), Image< T >::getWidth(), Image< T >::initialized(), inplaceAddBGnoise(), inplacePaste(), maxNormalize(), MAXNORMMAX, MAXNORMMIN, rescale(), VCXNORM_MAXNORM, and ZEROS.
 1.6.3
1.6.3