
A do-nothing behaviour used to compute the probability values for lgmd_extricate_tti's sensor model. More...
#include "Robots/LoBot/control/LoBehavior.H"#include "Robots/LoBot/misc/factory.hh"#include "Robots/LoBot/misc/singleton.hh"#include <string>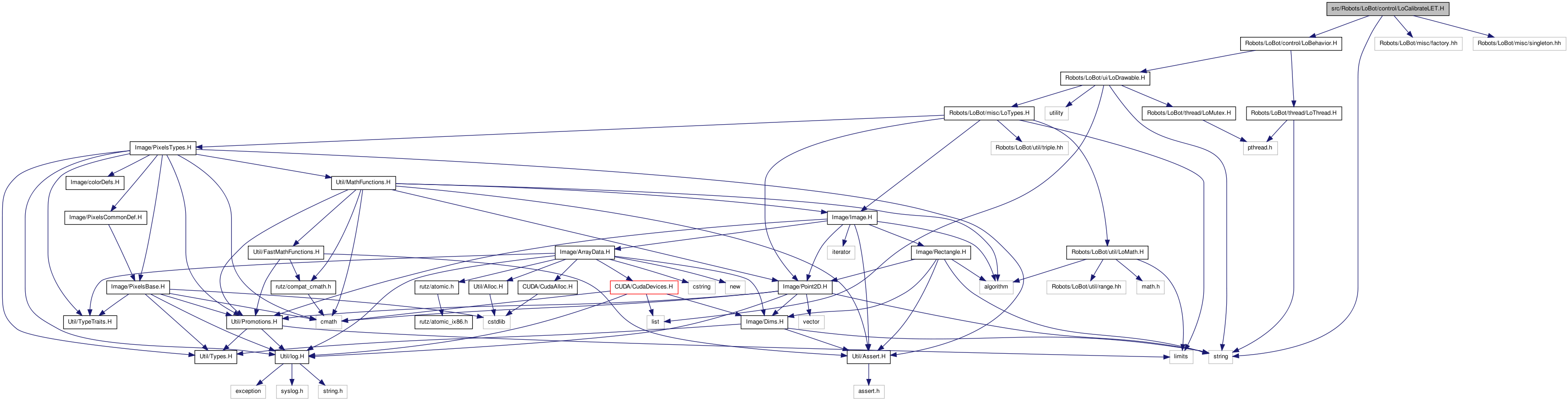
Go to the source code of this file.
Classes | |
| class | lobot::CalibrateLET |
| A do-nothing behaviour for calibrating lgmd_extricate_tti. More... | |
| class | lobot::CalibrateLET::Params |
A do-nothing behaviour used to compute the probability values for lgmd_extricate_tti's sensor model.
This file defines a class that computes probability values for the lgmd_extricate_tti behaviour's sensor model. The lgmd_extricate_tti behaviour works by applying recursive Bayesian updates to a probability distribution containing P(tti|lgmd) values. For the Bayesian update to work, the behaviour needs a table of P(lgmd|tti) values, the so-called sensor model.
Now, given a time-to-impact, the Gabbiani LGMD model yields the corresponding spike rate. Thus, to figure out P(lgmd|tti) values, all we need to do is pick random times-to-impact and apply the Gabbiani model to get the corresponding LGMD spike rates. We then discretize both these quantities to get the correct bin in the sensor model's probability table and simply increment that bin.
Definition in file LoCalibrateLET.H.
 1.6.3
1.6.3