
A behaviour for driving the robot forward. More...
#include <Robots/LoBot/control/LoForward.H>
Classes | |
| class | Params |
Friends | |
| class | subfactory< Forward, base > |
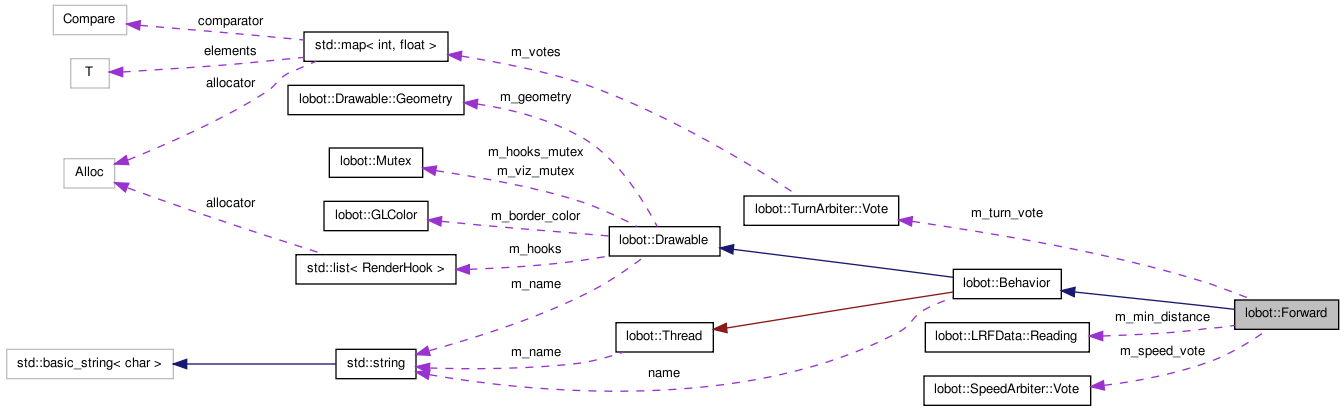
A behaviour for driving the robot forward.
This class implements a simple behaviour for driving the robot forward at the configured cruising speed.
Definition at line 73 of file LoForward.H.
 1.6.3
1.6.3