
Classes | |
| struct | TopicInfo |
Public Member Functions | |
| PrimaryMotorCortexI (OptionManager &mgr, const std::string &descrName="PrimaryMotorCortexService", const std::string &tagName="PrimaryMotorCortexService") | |
| virtual void | start2 () |
| This is called from within start() after the subcomponents have started. | |
| virtual void | stop1 () |
| This is called from within stop() before the subcomponents stop. | |
| void | init () |
| virtual void | evolve (const SimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| void | initSimEvents (Ice::CommunicatorPtr icPtr, Ice::ObjectPrx objectPrx) |
| void | unsubscribeSimEvents () |
| void | moveCameraToTarget (Point2D< int > targetLoc) |
| void | moveObject (Point3D< float > P1) |
| void | goHome () |
| PrimaryMotorCortexI (OptionManager &mgr, const std::string &descrName="PrimaryMotorCortex", const std::string &tagName="PrimaryMotorCortex") | |
| void | connectToRobot (Ice::CommunicatorPtr ic) |
| Attache to the IRobot. | |
| void | init (Ice::CommunicatorPtr ic, Ice::ObjectAdapterPtr adapter) |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| virtual void | stop2 () |
| This is called from within stop() after the subcomponents have stopped. | |
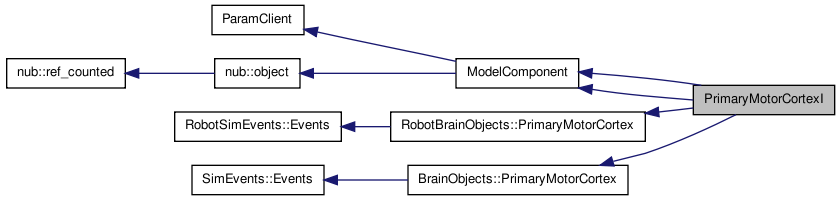
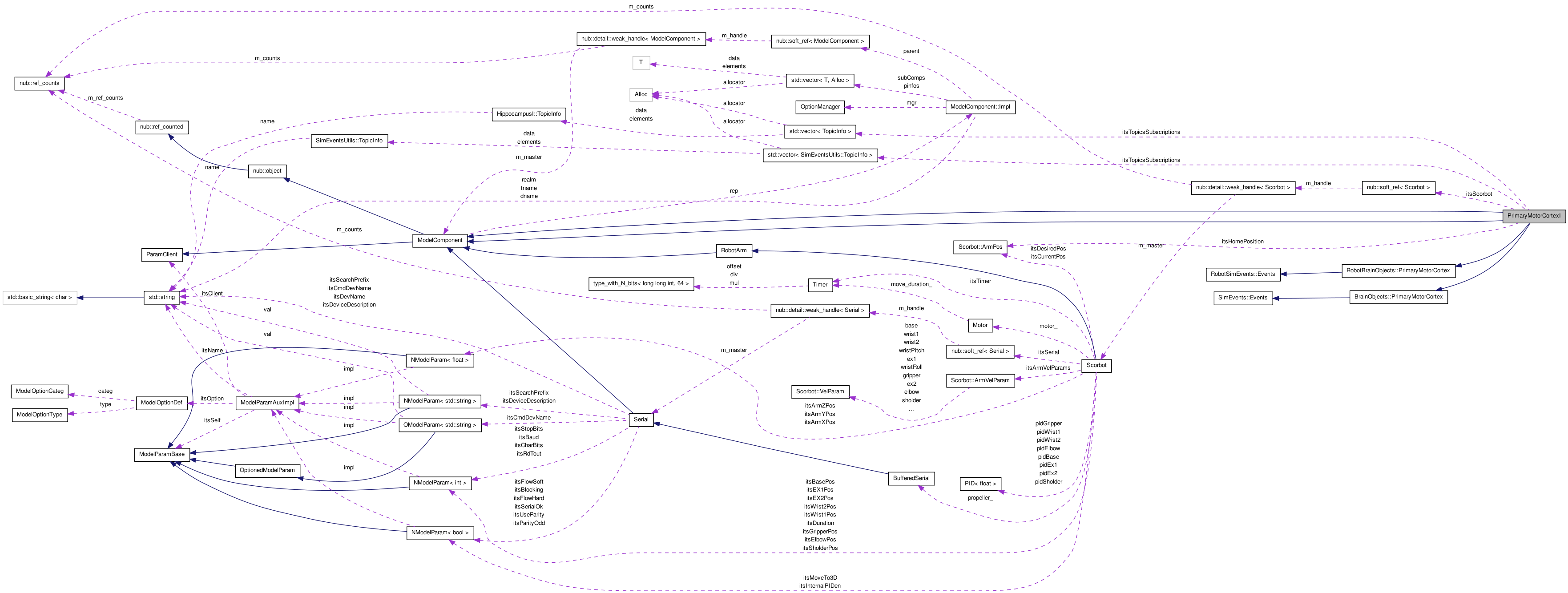
Definition at line 66 of file PrimaryMotorCortexService.H.
| void PrimaryMotorCortexI::connectToRobot | ( | Ice::CommunicatorPtr | ic | ) |
Attache to the IRobot.
| void PrimaryMotorCortexI::start2 | ( | ) | [virtual] |
This is called from within start() after the subcomponents have started.
Reimplemented from ModelComponent.
Definition at line 75 of file PrimaryMotorCortexService.C.
| void PrimaryMotorCortexI::stop1 | ( | ) | [virtual] |
This is called from within stop() before the subcomponents stop.
Reimplemented from ModelComponent.
Definition at line 79 of file PrimaryMotorCortexService.C.
| void PrimaryMotorCortexI::stop2 | ( | ) | [virtual] |
This is called from within stop() after the subcomponents have stopped.
Reimplemented from ModelComponent.
Definition at line 91 of file PrimaryMotorCortexI.C.
 1.6.3
1.6.3