
#include <Devices/IMU_MicroStrain_3DM_GX2.H>
Public Member Functions | |
| IMU_MicroStrain_3DM_GX2 (OptionManager &mgr, const std::string &descrName="IMU_MicroStrain_3DM_GX2", const std::string &tagName="IMU_MicroStrain_3DM_GX2", const std::string &dev="/dev/ttyUSB0") | |
| Initialize. | |
| ~IMU_MicroStrain_3DM_GX2 () | |
| Destructor. | |
| void | configureSerial (std::string dev) |
| to select which serial port to use | |
| void | getAccelerationAndAngularRate (AccelAndAngRateRecord &record) |
| get acceleration and angular rate | |
| void | getMagnetometer (MagnetometerRecord &record) |
| get magnetometer dircetion and magnitude | |
| void | getRollPitchYaw (RollPitchYawRecord &record) |
| get roll, pitch, and yaw | |
| bool | setDataRequested (DataRequested dataRequested) |
| set the data requested from the IMU | |
| DataRequested | getDataRequested () |
| void | run () |
| a thread that keeps updating the requested data | |
| bool | newData () |
| is there a new data since it is last accessed | |
Protected Member Functions | |
| void | start1 () |
| get started | |
| void | stop1 () |
| get stopped | |
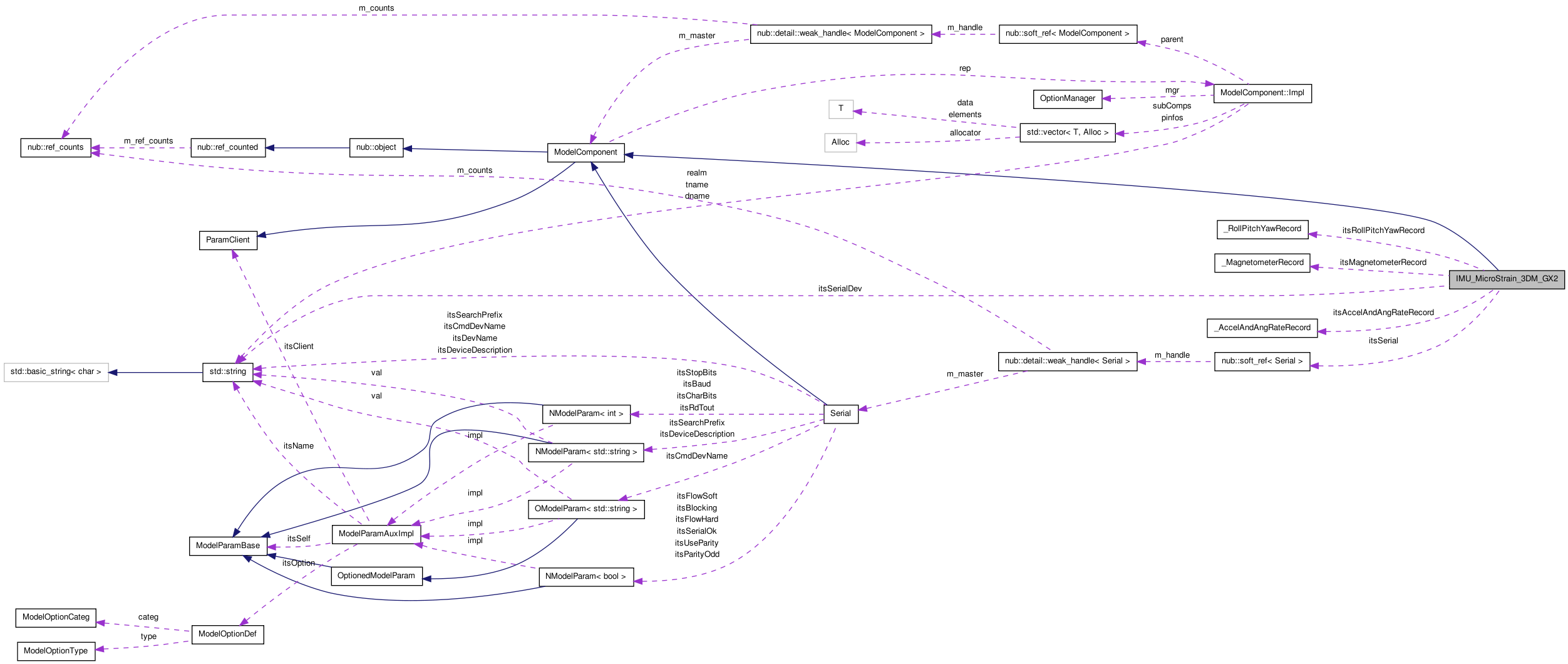
Class for interfacing with the IMU It sends X,Y,Z acceleration and X,Y,Z angular velocity
Definition at line 81 of file IMU_MicroStrain_3DM_GX2.H.
| IMU_MicroStrain_3DM_GX2::IMU_MicroStrain_3DM_GX2 | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "IMU_MicroStrain_3DM_GX2", |
|||
| const std::string & | tagName = "IMU_MicroStrain_3DM_GX2", |
|||
| const std::string & | dev = "/dev/ttyUSB0" | |||
| ) |
Initialize.
Definition at line 183 of file IMU_MicroStrain_3DM_GX2.C.
| IMU_MicroStrain_3DM_GX2::~IMU_MicroStrain_3DM_GX2 | ( | ) |
Destructor.
Definition at line 239 of file IMU_MicroStrain_3DM_GX2.C.
| void IMU_MicroStrain_3DM_GX2::configureSerial | ( | std::string | dev | ) |
to select which serial port to use
Definition at line 202 of file IMU_MicroStrain_3DM_GX2.C.
| void IMU_MicroStrain_3DM_GX2::getAccelerationAndAngularRate | ( | AccelAndAngRateRecord & | record | ) |
get acceleration and angular rate
Definition at line 338 of file IMU_MicroStrain_3DM_GX2.C.
Referenced by run().
| void IMU_MicroStrain_3DM_GX2::getMagnetometer | ( | MagnetometerRecord & | record | ) |
get magnetometer dircetion and magnitude
Definition at line 386 of file IMU_MicroStrain_3DM_GX2.C.
References getMagnetometer().
Referenced by getMagnetometer(), and run().
| void IMU_MicroStrain_3DM_GX2::getRollPitchYaw | ( | RollPitchYawRecord & | record | ) |
get roll, pitch, and yaw
Definition at line 428 of file IMU_MicroStrain_3DM_GX2.C.
References getRollPitchYaw().
Referenced by getRollPitchYaw(), and run().
| bool IMU_MicroStrain_3DM_GX2::newData | ( | ) |
is there a new data since it is last accessed
Definition at line 280 of file IMU_MicroStrain_3DM_GX2.C.
| void IMU_MicroStrain_3DM_GX2::run | ( | ) |
a thread that keeps updating the requested data
Definition at line 441 of file IMU_MicroStrain_3DM_GX2.C.
References Timer::get(), getAccelerationAndAngularRate(), getMagnetometer(), getRollPitchYaw(), and Timer::reset().
| bool IMU_MicroStrain_3DM_GX2::setDataRequested | ( | DataRequested | dataRequested | ) |
set the data requested from the IMU
Definition at line 246 of file IMU_MicroStrain_3DM_GX2.C.
| void IMU_MicroStrain_3DM_GX2::start1 | ( | ) | [protected, virtual] |
get started
Reimplemented from ModelComponent.
Definition at line 209 of file IMU_MicroStrain_3DM_GX2.C.
| void IMU_MicroStrain_3DM_GX2::stop1 | ( | ) | [protected, virtual] |
get stopped
Reimplemented from ModelComponent.
Definition at line 232 of file IMU_MicroStrain_3DM_GX2.C.
 1.6.3
1.6.3