
Public Member Functions | |
| SingleOpponentChannel (OptionManager &mgr, const std::string &descrName, const std::string &tagName, const VisualFeature vs, rutz::shared_ptr< PyrBuilder< float > > pyr) | |
| Constructor. See ChannelBase.H. | |
| virtual void | reset1 () |
| Reset SingleOpponentChannel. | |
| virtual Image< float > | centerSurround (const uint cntr, const uint surr) const |
| Get the center/surround image for the given levels. | |
| virtual void | centerSurround (const uint cntr, const uint surr, Image< float > &pos, Image< float > &neg) const |
| Get the center/surround, split into positive and negative parts. | |
| virtual void | getFeatures (const Point2D< int > &locn, std::vector< float > &mean) const |
| virtual void | getFeaturesBatch (std::vector< Point2D< int > * > *locn, std::vector< std::vector< float > > *mean, int *count) const |
| void | singleOpponentInput (const Dims &dims, const ImageSet< float > ¢erPyr, const ImageSet< float > &surroundPyr, const SimTime &t, const Image< byte > &clipMask) |
| Single-opponent SingleChannel requires center and surround pyramids. | |
Protected Member Functions | |
| void | storePyramid2 (const ImageSet< float > &p, const SimTime &t) |
| Stores p as the channel's surround pyramid at time t. | |
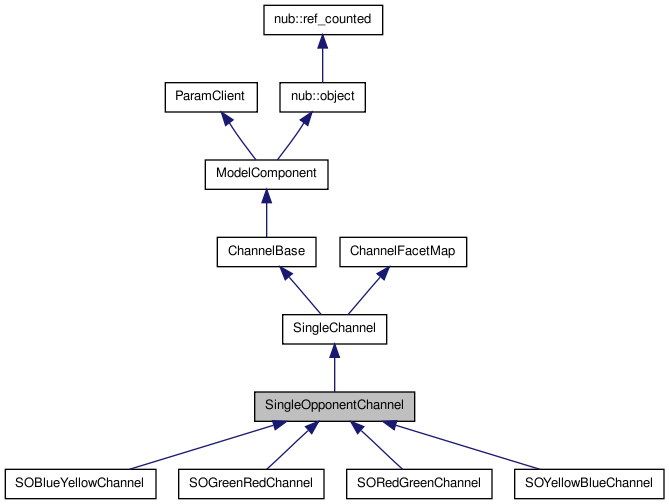
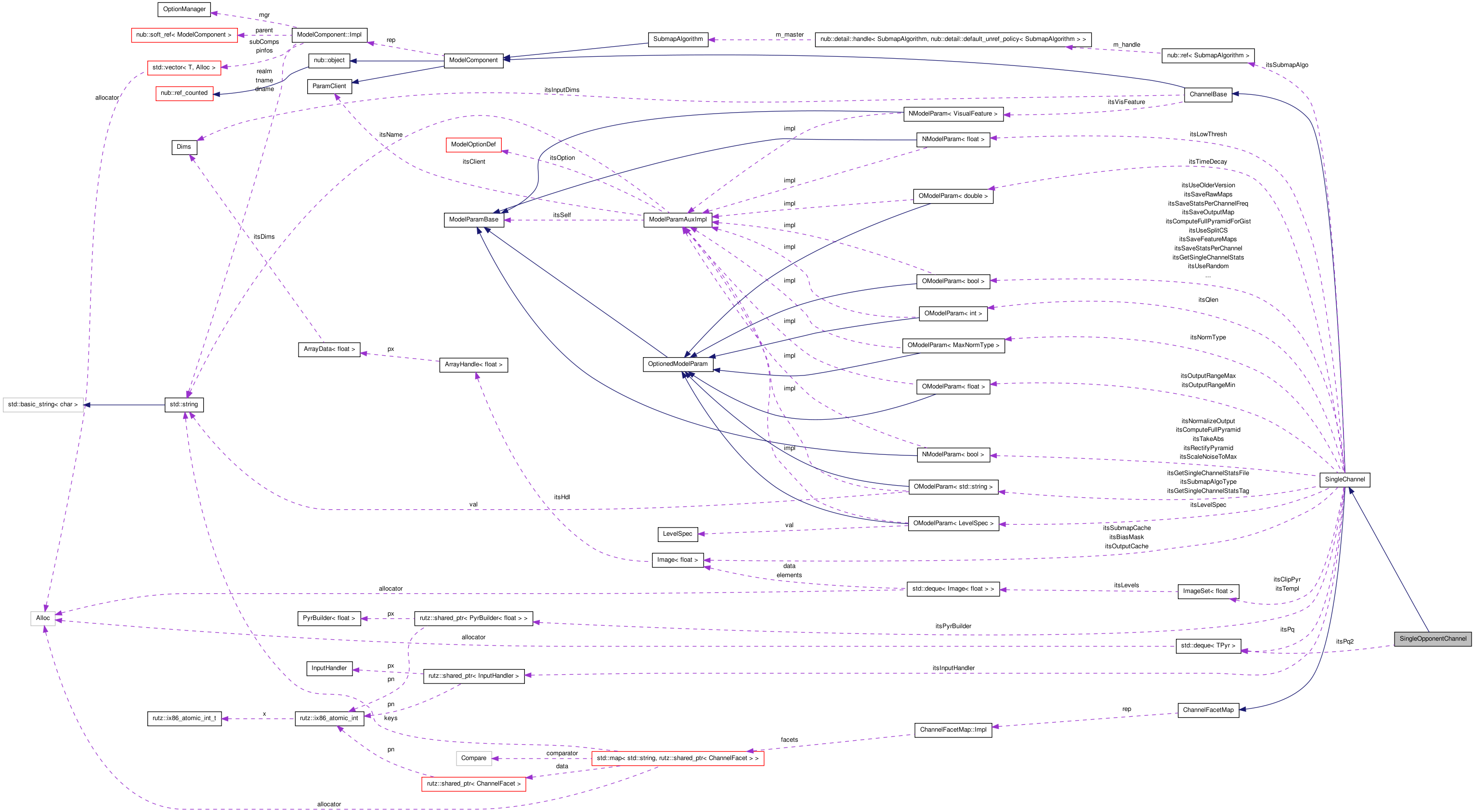
Definition at line 43 of file SingleOpponentChannel.H.
| SingleOpponentChannel::SingleOpponentChannel | ( | OptionManager & | mgr, | |
| const std::string & | descrName, | |||
| const std::string & | tagName, | |||
| const VisualFeature | vs, | |||
| rutz::shared_ptr< PyrBuilder< float > > | pyr | |||
| ) |
Constructor. See ChannelBase.H.
| mgr | our ModelManager (see ModelManager.H) | |
| descrName | descriptive name for human usage | |
| tagName | name for ParamMap usage | |
| vs | The VisualFeature implemented by the channel | |
| pyr | The type of pyramid that should be used. |
Definition at line 49 of file SingleOpponentChannel.C.
| void SingleOpponentChannel::centerSurround | ( | const uint | cntr, | |
| const uint | surr, | |||
| Image< float > & | pos, | |||
| Image< float > & | neg | |||
| ) | const [virtual] |
Get the center/surround, split into positive and negative parts.
Reimplemented from SingleChannel.
Definition at line 110 of file SingleOpponentChannel.C.
References ASSERT, centerSurroundDiffSingleOpponent(), centerSurroundSingleOpponent(), SingleChannel::clipPyramid(), LevelSpec::csOK(), exp(), OModelParam< T >::getVal(), SingleChannel::hasPyramid(), SingleChannel::itsTimeDecay, SingleChannel::pyramid(), SingleChannel::pyramidTime(), and SimTime::secs().
| Image< float > SingleOpponentChannel::centerSurround | ( | const uint | cntr, | |
| const uint | surr | |||
| ) | const [virtual] |
Get the center/surround image for the given levels.
Reimplemented from SingleChannel.
Definition at line 68 of file SingleOpponentChannel.C.
References ASSERT, centerSurroundDiffSingleOpponent(), centerSurroundSingleOpponent(), SingleChannel::clipPyramid(), LevelSpec::csOK(), exp(), OModelParam< T >::getVal(), NModelParam< T >::getVal(), SingleChannel::hasPyramid(), SingleChannel::itsTimeDecay, SingleChannel::pyramid(), SingleChannel::pyramidTime(), and SimTime::secs().
| void SingleOpponentChannel::reset1 | ( | ) | [virtual] |
Reset SingleOpponentChannel.
Reimplemented from SingleChannel.
Definition at line 60 of file SingleOpponentChannel.C.
| void SingleOpponentChannel::singleOpponentInput | ( | const Dims & | dims, | |
| const ImageSet< float > & | centerPyr, | |||
| const ImageSet< float > & | surroundPyr, | |||
| const SimTime & | t, | |||
| const Image< byte > & | clipMask | |||
| ) |
Single-opponent SingleChannel requires center and surround pyramids.
Definition at line 247 of file SingleOpponentChannel.C.
References SingleChannel::killCaches(), SingleChannel::setClipPyramid(), SingleChannel::storePyramid(), and storePyramid2().
Referenced by SOColorChannel::doInput().
| void SingleOpponentChannel::storePyramid2 | ( | const ImageSet< float > & | p, | |
| const SimTime & | t | |||
| ) | [protected] |
Stores p as the channel's surround pyramid at time t.
Definition at line 262 of file SingleOpponentChannel.C.
References ASSERT, OModelParam< T >::getVal(), isDyadic(), LevelSpec::levMin(), and LevelSpec::maxDepth().
Referenced by singleOpponentInput().
 1.6.3
1.6.3