
#include <Robots/Beobot2/Hardware/BeoPilot.H>
Public Member Functions | |
| BeoPilot (int id, OptionManager &mgr, const std::string &descrName="BeoPilot", const std::string &tagName="BeoPilot") | |
| virtual void | evolve () |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| to publishes a message. | |
| virtual void | registerTopics () |
| and registerPublisher calls that you would like to happen automatically after init. | |
| void | checkLogFile () |
| void | loadFromLogFile () |
| void | start3 () |
| void | updateGUI () |
| void | SetMotors (float motor1speed, float motor2speed) |
| unsigned char | getRCStatus () |
| unsigned int | getRCChannel (int channel) |
| unsigned char | getRCEnabled () |
| unsigned int | getRCSpeed () |
| void | UpdateRCStatus () |
| void | resetEncoder () |
| void | UpdatePosition (void) |
| void | getCurrentLogData (void) |
| void | reDrawMap (double scale) |
| void | drawAllMap (void) |
| int | file_exists (const char *fileName) |
| void | start () |
| void | SetMotors (float motor1speed, float motor2speed) |
| void | SetMotorsPid (float motor1speed, float motor2speed) |
| unsigned char | getRCStatus () |
| unsigned int | getRCChannel (int channel) |
| unsigned char | getRCEnabled () |
| unsigned int | getRCSpeed () |
| void | UpdateRCStatus () |
| void | UpdatePosition (void) |
| void | resetEncoder () |
Public Attributes | |
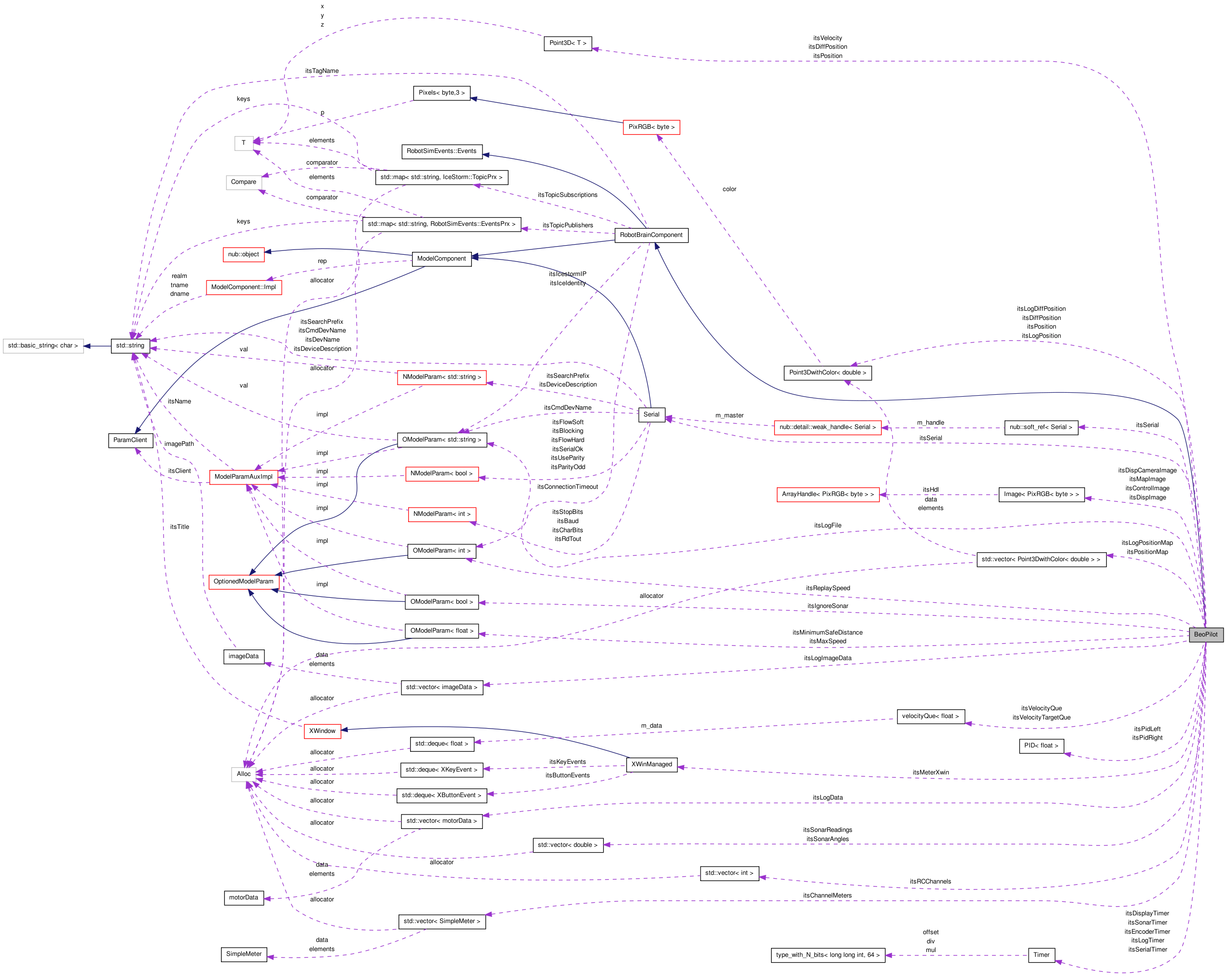
| Serial * | itsSerial |
| ros::Time | itsPreviousTime |
| Point3D | itsPosition |
| Point3D | itsDiffPosition |
| Point3D | itsVelocity |
| control_toolbox::Pid | itsPidSpeed |
| control_toolbox::Pid | itsPidRot |
| ros::Duration | dt |
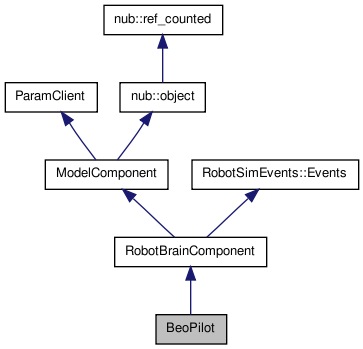
The BeoPilot module is responsible for actually driving the BeoBot2. All motor requests are serviced to hardware by this module through MotorRequest messages.
Definition at line 99 of file BeoPilot.H.
| void BeoPilot::evolve | ( | ) | [virtual] |
Evolve keeps the motor driver propeller up to date on the latest motor speed requests. If the evolve loop ever hangs for more than 1/4 second, then the propeller will shut down the motors until it recieves a new message.
dev/ttyUSB0
Reimplemented from RobotBrainComponent.
Definition at line 254 of file BeoPilot.C.
References Timer::get(), Timer::getSecs(), OModelParam< T >::getVal(), Timer::pause(), RobotBrainComponent::publish(), Timer::reset(), Timer::resume(), and PID< T >::update().
| void BeoPilot::loadFromLogFile | ( | ) |
Check the serial port to ensure that we are connected to a 'motorboard' propeller, and also check the sanity of our command line options
Definition at line 163 of file BeoPilot.C.
References OModelParam< T >::getVal(), and Timer::reset().
| void BeoPilot::registerTopics | ( | ) | [virtual] |
and registerPublisher calls that you would like to happen automatically after init.
Register Topics: This function is called at the end of init, and is virtual so that is can be overloaded by chid classes. In your overloaded version you should put all of the registerSubsciption
Reimplemented from RobotBrainComponent.
Definition at line 246 of file BeoPilot.C.
References RobotBrainComponent::registerPublisher(), and RobotBrainComponent::registerSubscription().
| void BeoPilot::start | ( | ) |
Evolve keeps the motor driver propeller up to date on the latest motor speed requests. If the evolve loop ever hangs for more than 1/4 second, then the propeller will shut down the motors until it recieves a new message.
Reimplemented from ModelComponent.
Definition at line 22 of file BeoPilot.C.
| void BeoPilot::start3 | ( | ) | [virtual] |
start3: Gets called immediately after start2, which is after all of the subcomponents have been started. If you have any code that needs to run only once at the beginning before the general run/evolve loop, but after the constructor, then you can put it here.
Reimplemented from RobotBrainComponent.
Definition at line 221 of file BeoPilot.C.
References OModelParam< T >::getVal().
| void BeoPilot::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
to publishes a message.
Update Message: Gets called by the Ice runtime when a publisher of a message that your object subscribes
Reimplemented from RobotBrainComponent.
Definition at line 1020 of file BeoPilot.C.
References Timer::reset().
 1.6.3
1.6.3