
#include "Component/ModelManager.H"#include "Image/Image.H"#include "Image/Pixels.H"#include "Media/FrameSeries.H"#include "NeovisionII/nv2_common.h"#include "NeovisionII/nv2_label_server.h"#include <iostream>#include <signal.h>#include "ArmControl/CtrlPolicy.H"#include "ArmControl/ArmSim.H"#include "ArmControl/RobotArm.H"#include "ArmControl/ArmController.H"#include "ArmControl/ArmPlanner.H"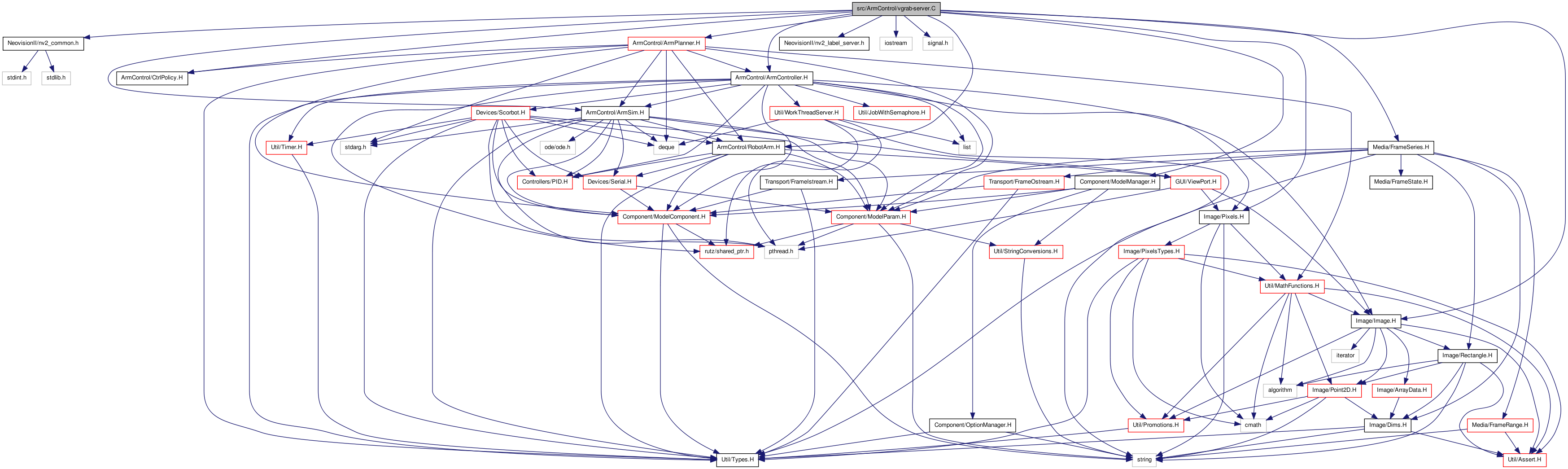
Go to the source code of this file.
Defines | |
| #define | Z_THRESH -0.180 |
Functions | |
| void | terminateProc (int s) |
| bool | moveToObject (const Point2D< int > fix, const nub::soft_ref< Scorbot > &scorbot) |
| int | main (const int argc, const char **argv) |
Variables | |
| bool | terminate = false |
| struct nv2_label_server * | server |
| nub::soft_ref< Scorbot > | scorbot |
| nub::soft_ref< ArmController > | armControllerScorbot |
| PID< float > | basePID (-0.75f, 0.55, 0.0,-20,-20, 10,-35, 35) |
| PID< float > | sholderPID (-20.0f, 0.0, 0.0,-20,-20, 10,-20, 20, 100,-100, 150, true, 1.0, 0.001,-0.001) |
| PID< float > | elbowPID (-1.0f, 0.25, 0.0,-20,-20, 10,-40, 40) |
Definition in file vgrab-server.C.
 1.6.3
1.6.3