
A behaviour for unsticking the robot after the emergency stop behaviour stops it dead in its tracks because things have gotten too close for comfort. More...
#include <Robots/LoBot/control/LoExtricate.H>
Classes | |
| struct | Command |
Friends | |
| class | subfactory< Extricate, base > |
A behaviour for unsticking the robot after the emergency stop behaviour stops it dead in its tracks because things have gotten too close for comfort.
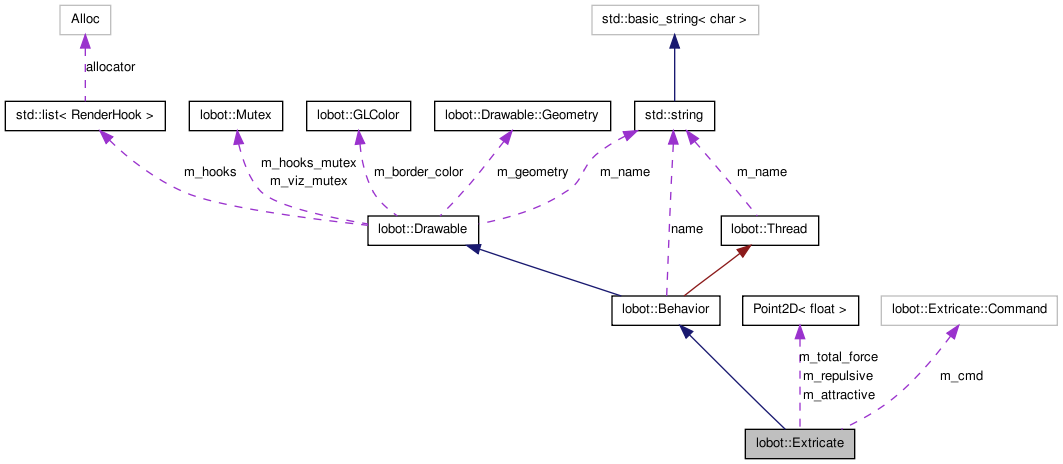
This class implements a behaviour that monitors the robot's danger zone and commands the robot to back-up, turn and/or drive forwards as required to get it away from the wall, corner or other obstacle currently obstructing its path so that it can start moving normally again.
The extrication algorithm is based on the potential field idea: each danger reading exerts a virtual repulsive force on the robot while distance measurements outside of the danger zone exert an attractive force. The sum of all these force vectors is used to drive and steer the robot away from obstacles.
Definition at line 78 of file LoExtricate.H.
 1.6.3
1.6.3