
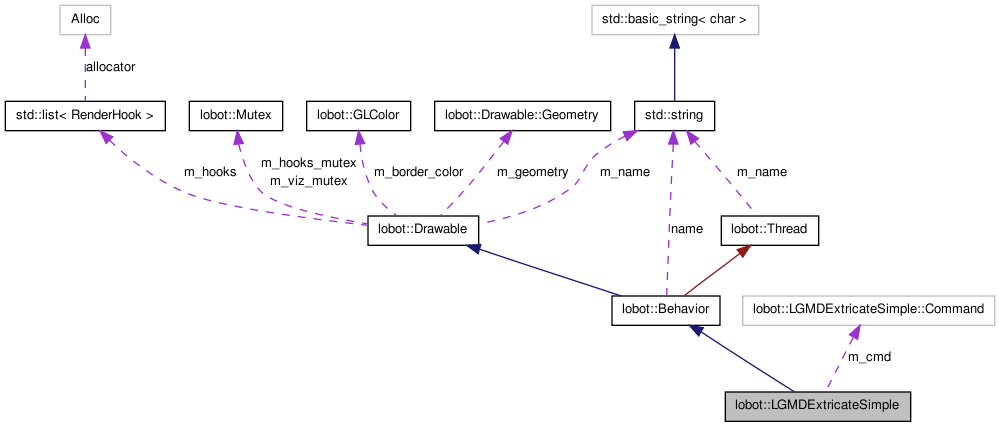
A behaviour for moving the robot away from obstacles by stopping and spinning it in the direction of least LGMD spiking. More...
#include <Robots/LoBot/control/LoLGMDExtricateSimple.H>
Classes | |
| struct | Command |
Friends | |
| class | subfactory< LGMDExtricateSimple, base > |
A behaviour for moving the robot away from obstacles by stopping and spinning it in the direction of least LGMD spiking.
This class implements a behaviour that uses raw LGMD spikes to move lobot away from obstacles obstructing its path. What we mean by "raw" here is that this behaviour does not process the LGMD spikes in any way (e.g., time-to-impact state estimation or signal processing of any kind).
Instead, the behaviour simply scans the LGMD array and spins the robot to make it face the direction corresponding to minimal spiking activity.
Definition at line 80 of file LoLGMDExtricateSimple.H.
 1.6.3
1.6.3