
Classes | |
| struct | Flags |
| struct | SensorType |
Public Member Functions | |
| void | takeReading (const RobotSimEvents::EventMessagePtr &realMsg) |
| void | takeVirtualReading (VirtualSensorMessage::VirtualSensorMessage *virtualMsg) |
| virtual void | calculateInitialOffset ()=0 |
| virtual float | getScaledVote ()=0 |
Static Public Member Functions | |
|
static VirtualSensorMessage::VirtualSensorMessage * | generatetVirtualSensorMessage (LocalizationParticle &part, LocalizationMap &map) |
Public Attributes | |
| float | mScale |
| RobotSimEvents::EventMessagePtr | mRealMsg |
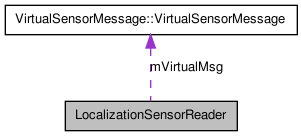
| VirtualSensorMessage::VirtualSensorMessage * | mVirtualMsg |
| float | mVote |
| float | mScaledVote |
| int | mSensorType |
| bool | inited |
Definition at line 64 of file LocalizationSensorReader.h.
 1.6.3
1.6.3