
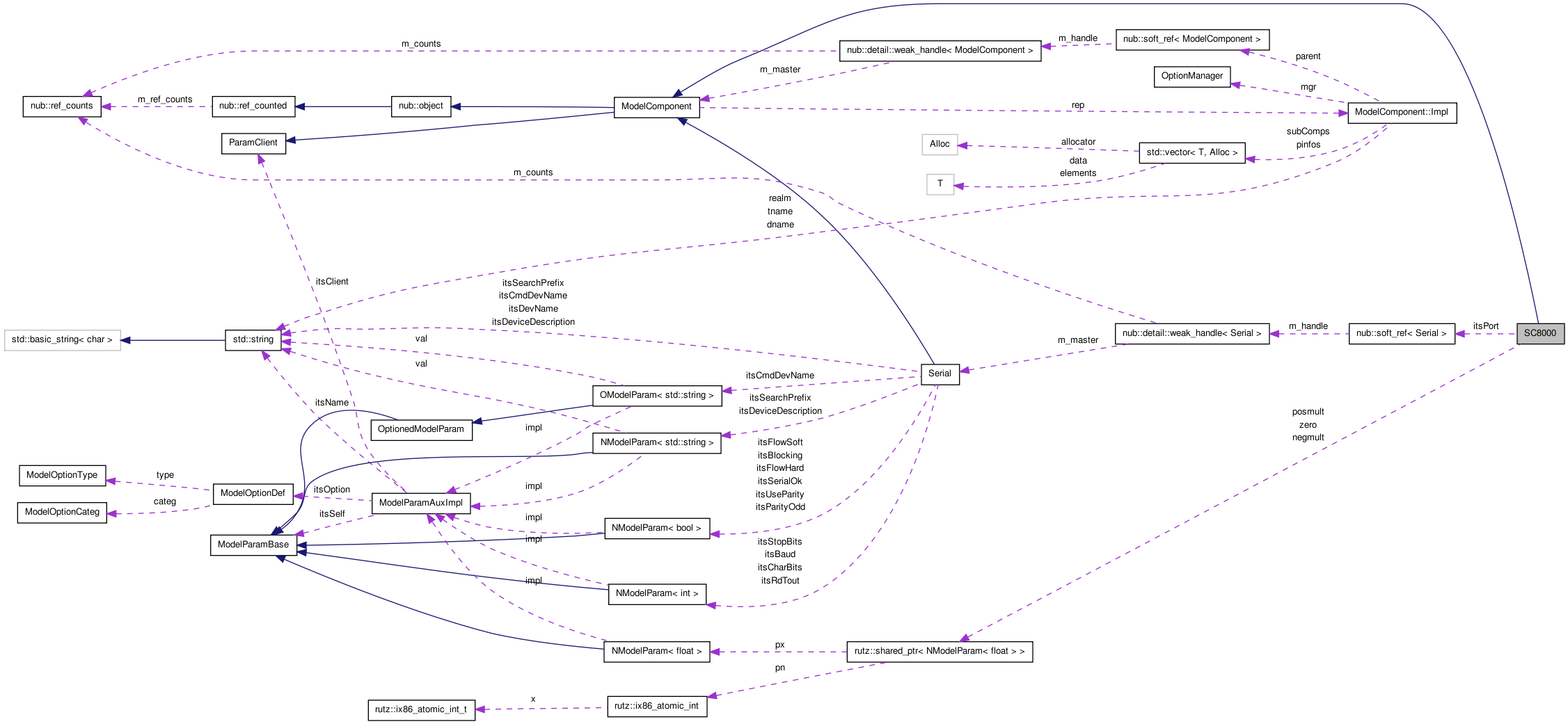
Interface to a serial-servo-controller. More...
#include <Devices/sc8000.H>
Public Member Functions | |
| SC8000 (OptionManager &mgr, const std::string &descrName="SC8000 Servo Driver", const std::string &tagName="SC8000driver", const char *defdev="/dev/ttyUSB0") | |
| Default constructor; see ModelComponent.H. | |
| ~SC8000 () | |
| Destructor. | |
| bool | move (const int servo, const float position) |
| Moves servo # to given position in [-1.0 .. 1.0]. | |
| float | getPosition (const int servo) const |
| Gets the current position of given servo. | |
| void | calibrate (const int servo, const short neutralval, const short minval, const short maxval) |
| Calibrate a servo. | |
| bool | moveRaw (const int servo, const short rawpos) |
| Moves servo # to given RAW (uncalibrated) position in [0..65535]. | |
| short | getPositionRaw (const int servo) const |
| Gets the current RAW (uncalibrated) position [0..65535] of given servo. | |
Protected Member Functions | |
| float | rawToCalib (const int servo, const short rawpos) const |
| Convert from raw (0..65535) to calibrated (-1.0..1.0) position. | |
| short | calibToRaw (const int servo, const float position) const |
| Convert from calibrated (-1.0..1.0) to raw (0..65535) position. | |
Protected Attributes | |
| nub::soft_ref< Serial > | itsPort |
| Serial port to use. | |
| rutz::shared_ptr< NModelParam < float > > * | zero |
| zero calibration values | |
| rutz::shared_ptr< NModelParam < float > > * | posmult |
| positive multiplier calib | |
| rutz::shared_ptr< NModelParam < float > > * | negmult |
| negative multiplier calib | |
| short * | pos |
| raw servo positions [0..65535] | |
Interface to a serial-servo-controller.
The sc8000.C and sc8000.H files has the sc-8000 controller code that help control the servos via the controller. The class is SC8000 class. Its functions include moving a servo to a specified position, using a serial port. There are two ways to move the servos and thet their current positions: either using calibrated values in [-1.0..1.0], or using raw positions in [0..65535]. Calibrated positions are converted to raw using two linear ramps (one for each side of the neutral position) that can be set using the calibrate() function. EXAMPLE: if you do a calibrate(servo, 100, 20, 150), then, subsequently, move(servo, 0.0F) will be equivalent to moveRaw(servo, 100), move(servo, -1.0F) will be equivalent to moveRaw(servo, 20) and move(servo, 1.0F) will be equivalent to moveRaw(servo, 150).
Definition at line 63 of file sc8000.H.
| SC8000::SC8000 | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "SC8000 Servo Driver", |
|||
| const std::string & | tagName = "SC8000driver", |
|||
| const char * | defdev = "/dev/ttyUSB0" | |||
| ) |
Default constructor; see ModelComponent.H.
Definition at line 46 of file sc8000.C.
References ModelComponent::addSubComponent(), itsPort, negmult, pos, posmult, and zero.
| void SC8000::calibrate | ( | const int | servo, | |
| const short | neutralval, | |||
| const short | minval, | |||
| const short | maxval | |||
| ) |
| short SC8000::calibToRaw | ( | const int | servo, | |
| const float | position | |||
| ) | const [protected] |
| float SC8000::getPosition | ( | const int | servo | ) | const |
Gets the current position of given servo.
Definition at line 85 of file sc8000.C.
References pos, and rawToCalib().
| short SC8000::getPositionRaw | ( | const int | servo | ) | const |
| bool SC8000::move | ( | const int | servo, | |
| const float | position | |||
| ) |
Moves servo # to given position in [-1.0 .. 1.0].
Returns true on success, false if some serial error occurred.
Definition at line 81 of file sc8000.C.
References calibToRaw(), and moveRaw().
| bool SC8000::moveRaw | ( | const int | servo, | |
| const short | rawpos | |||
| ) |
| float SC8000::rawToCalib | ( | const int | servo, | |
| const short | rawpos | |||
| ) | const [protected] |
nub::soft_ref<Serial> SC8000::itsPort [protected] |
rutz::shared_ptr<NModelParam<float> >* SC8000::negmult [protected] |
negative multiplier calib
Definition at line 100 of file sc8000.H.
Referenced by calibrate(), calibToRaw(), rawToCalib(), and SC8000().
short* SC8000::pos [protected] |
raw servo positions [0..65535]
Definition at line 101 of file sc8000.H.
Referenced by getPosition(), getPositionRaw(), moveRaw(), and SC8000().
rutz::shared_ptr<NModelParam<float> >* SC8000::posmult [protected] |
positive multiplier calib
Definition at line 99 of file sc8000.H.
Referenced by calibrate(), calibToRaw(), rawToCalib(), and SC8000().
rutz::shared_ptr<NModelParam<float> >* SC8000::zero [protected] |
zero calibration values
Definition at line 98 of file sc8000.H.
Referenced by calibrate(), calibToRaw(), rawToCalib(), and SC8000().
 1.6.3
1.6.3