
Class to recognize scenes and get landmark positions. More...
#include <RCBot/SceneRec.H>
Public Member Functions | |
| SceneRec (OptionManager &mgr, const std::string &descrName="Scene Recognition", const std::string &tagName="SceneRec") | |
| ~SceneRec () | |
| Destructor. | |
| void | newInput (const Image< PixRGB< byte > > img) |
| Setup up with image to be processed. | |
| bool | outputReady () |
| Is the last given input done processing? | |
| short | getLandmarkLoc (Point2D< int > &loc) |
| Get the feature point and return the current leg. | |
| void | computeLocation () |
| Main process for computing locations. | |
| void | trainFeature (Image< PixRGB< byte > > &img, Point2D< int > loc, Dims window, short leg) |
| Train the system on a given feature location. | |
| void | loadVisualDB (short leg) |
| Load the current and the next vdb from position 'leg'. | |
Protected Member Functions | |
| virtual void | start1 () |
| This is called from within start() before the subcomponents start. | |
| virtual void | stop2 () |
| This is called from within stop() after the subcomponents have stopped. | |
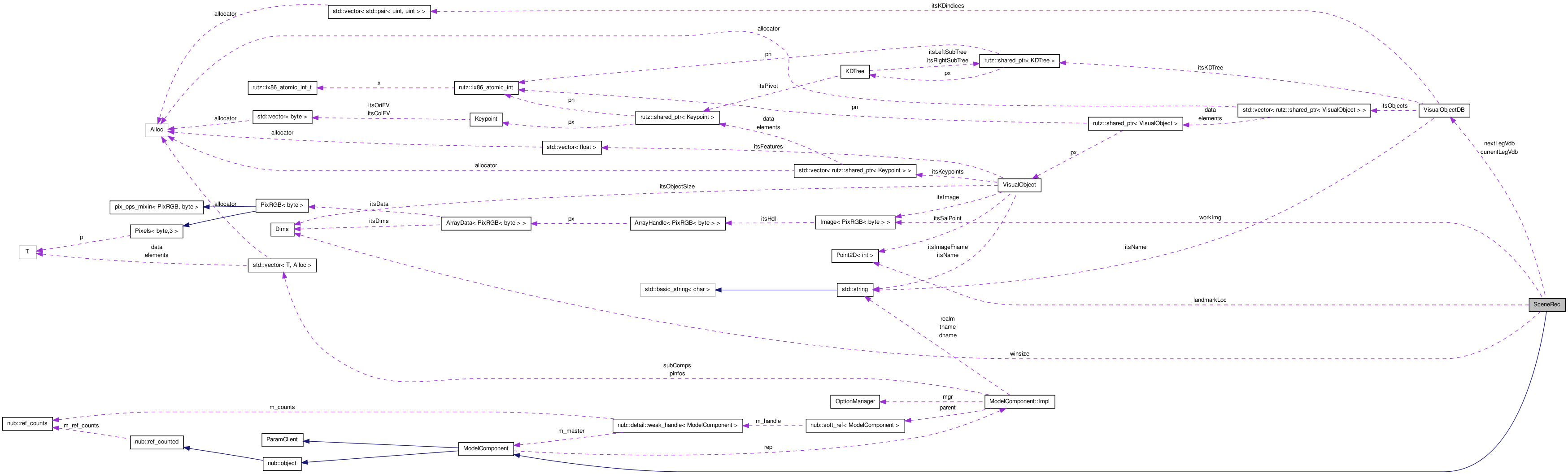
Class to recognize scenes and get landmark positions.
Definition at line 52 of file SceneRec.H.
| SceneRec::~SceneRec | ( | ) |
Destructor.
Definition at line 94 of file SceneRec.C.
| void SceneRec::computeLocation | ( | ) |
Main process for computing locations.
Definition at line 182 of file SceneRec.C.
References VisualObjectDB::getObjectMatches(), Point2D< T >::i, Image< T >::initialized(), loadVisualDB(), and VisualObjectDB::numObjects().
| short SceneRec::getLandmarkLoc | ( | Point2D< int > & | loc | ) |
Get the feature point and return the current leg.
Definition at line 122 of file SceneRec.C.
| void SceneRec::loadVisualDB | ( | short | leg | ) |
Load the current and the next vdb from position 'leg'.
Definition at line 308 of file SceneRec.C.
References VisualObjectDB::loadFrom(), VisualObjectDB::numObjects(), and VisualObjectDB::saveTo().
Referenced by computeLocation(), start1(), and trainFeature().
Setup up with image to be processed.
Definition at line 98 of file SceneRec.C.
| bool SceneRec::outputReady | ( | ) |
Is the last given input done processing?
Reimplemented in SceneRecServer_i.
Definition at line 110 of file SceneRec.C.
| void SceneRec::start1 | ( | ) | [protected, virtual] |
This is called from within start() before the subcomponents start.
Reimplemented from ModelComponent.
Definition at line 67 of file SceneRec.C.
References loadVisualDB().
| void SceneRec::stop2 | ( | ) | [protected, virtual] |
This is called from within stop() after the subcomponents have stopped.
Reimplemented from ModelComponent.
Definition at line 88 of file SceneRec.C.
| void SceneRec::trainFeature | ( | Image< PixRGB< byte > > & | img, | |
| Point2D< int > | loc, | |||
| Dims | window, | |||
| short | leg | |||
| ) |
Train the system on a given feature location.
Definition at line 132 of file SceneRec.C.
References VisualObjectDB::addObject(), Dims::h(), height, Point2D< T >::i, loadVisualDB(), VisualObjectDB::saveTo(), and Dims::w().
 1.6.3
1.6.3