
a class to control psychodisplay from a host sending commands More...
#include <Psycho/StimController.H>
Public Member Functions | |
| StimController (OptionManager &mgr, const std::string &descrName=" StimController", const std::string &tagName="StimController") | |
| constructor | |
| virtual | ~StimController () |
| destructor | |
| void | initialize (const StimListener *const sl) |
| initialize our object with a stimulus controller and listener | |
| void | setEventLog (const nub::soft_ref< EventLog > &elog) |
| set the event log for our components | |
| void | setDisplay (const nub::soft_ref< PsychoDisplay > &display) |
| set the handle to a psycho display | |
| rutz::shared_ptr< StimListener > | getStimListener () |
| return a reference to the current listener | |
| rutz::shared_ptr < DisplayController > | getDispController () |
| return a reference to the current Controller | |
| void | pauseDisplay (const bool pausestate) |
Protected Member Functions | |
| void | start2 () |
| start our module | |
| void | stop1 () |
| This is called from within stop() before the subcomponents stop. | |
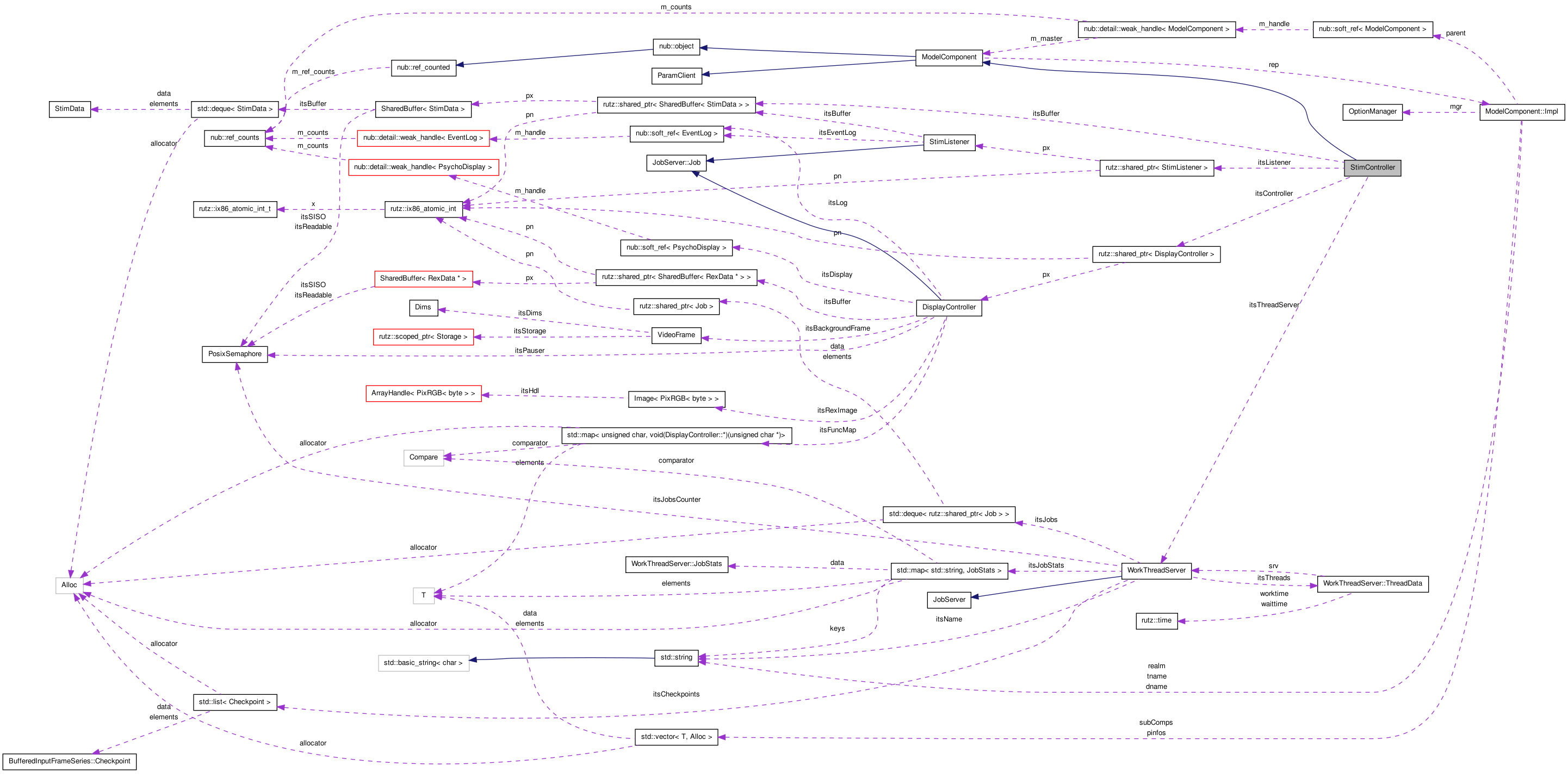
a class to control psychodisplay from a host sending commands
A ModelComponent that coordinates communication between the SDL display code and an external system. An object of this type initiates two threads, one to listen for commands from a host, and one to render them to the screen using SDL. The calling program can also pass in data which can be incorporated into the next display.
Definition at line 53 of file StimController.H.
| StimController::StimController | ( | OptionManager & | mgr, | |
| const std::string & | descrName = " StimController", |
|||
| const std::string & | tagName = "StimController" | |||
| ) |
constructor
Definition at line 113 of file StimController.H.
| StimController::~StimController | ( | ) | [virtual] |
destructor
Definition at line 125 of file StimController.H.
| rutz::shared_ptr< DisplayController > StimController::getDispController | ( | ) |
return a reference to the current Controller
Definition at line 184 of file StimController.H.
| rutz::shared_ptr< StimListener > StimController::getStimListener | ( | ) |
return a reference to the current listener
Definition at line 178 of file StimController.H.
| void StimController::initialize | ( | const StimListener *const | sl | ) |
initialize our object with a stimulus controller and listener
| void StimController::pauseDisplay | ( | const bool | pausestate | ) |
pause the display, we will still recieve commands, but stop processing them until unpaused.
Definition at line 190 of file StimController.H.
| void StimController::setDisplay | ( | const nub::soft_ref< PsychoDisplay > & | display | ) |
set the handle to a psycho display
Definition at line 149 of file StimController.H.
References rutz::shared_ptr< T >::is_valid().
| void StimController::setEventLog | ( | const nub::soft_ref< EventLog > & | elog | ) |
set the event log for our components
Definition at line 137 of file StimController.H.
References rutz::shared_ptr< T >::is_valid().
| void StimController::start2 | ( | ) | [protected, virtual] |
start our module
Reimplemented from ModelComponent.
Definition at line 159 of file StimController.H.
References WorkThreadServer::enqueueJob().
| void StimController::stop1 | ( | ) | [protected, virtual] |
This is called from within stop() before the subcomponents stop.
Reimplemented from ModelComponent.
Definition at line 170 of file StimController.H.
 1.6.3
1.6.3