
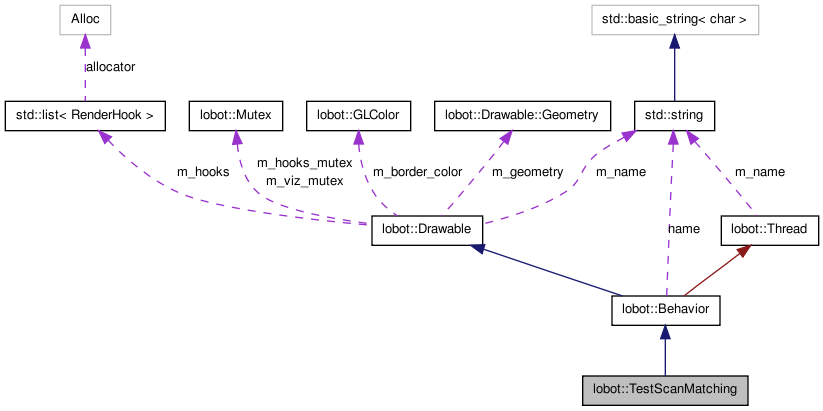
A behaviour for testing the laser range finder scan matching algorithm. More...
#include <Robots/LoBot/control/LoTestScanMatching.H>
Friends | |
| class | subfactory< TestScanMatching, base > |
A behaviour for testing the laser range finder scan matching algorithm.
This class implements a behaviour that uses some test data to check whether the Robolocust's scan matching algorithm works or not. It reads the test data from a file and feeds that to the scan matching module. This behaviour does not affect the robot in any way; rather it is meant to be run standalone and not even on the robot.
Definition at line 74 of file LoTestScanMatching.H.
 1.6.3
1.6.3