
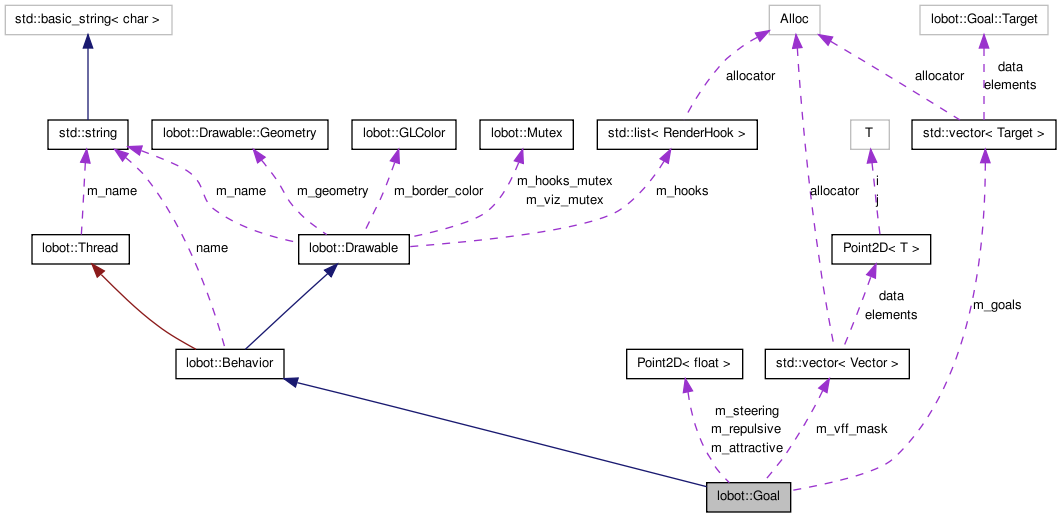
A behaviour for driving the robot toward a list of goals. More...
#include <Robots/LoBot/control/LoGoal.H>
Classes | |
| class | Target |
| A helper class for encapsulating a goal. | |
Friends | |
| class | subfactory< Goal, base > |
A behaviour for driving the robot toward a list of goals.
This class implements a behaviour for driving the robot toward each goal in a list of goals. When the robot reaches a goal, the behaviour can be configured to continue on to the next goal or pause and wait for the user to resume the robot. When the robot is at the last goal in the list, the behaviour can either maintain the final goal or loop to the first goal and start over. Additionally, in looping mode, the behaviour can either start from the first goal or backtrack over the goal list in reverse.
By default, the behaviour continues on to the next goal once it reaches one goal on the list and it maintains the final goal when it reaches the end of the goal list.
A goal is a rectangle specified in map coordinates. The behaviour will direct the robot towards the center of each goal rectangle. However, the goal is considered satisfied when the robot is located anywhere within the target rectangle.
Definition at line 93 of file LoGoal.H.
 1.6.3
1.6.3