
A behaviour for updating the Robolocust occupancy grid. More...
#include <Robots/LoBot/control/LoSurvey.H>
Classes | |
| class | cond_helper |
| class | odometry_helper |
| struct | reset_helper |
| struct | threshold_helper |
Friends | |
| class | subfactory< Survey, base > |
| class | cond_helper |
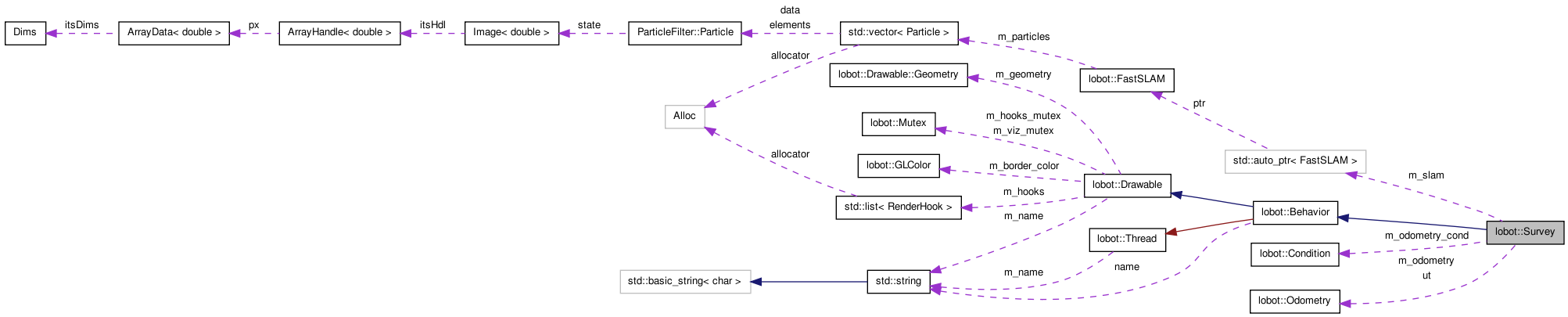
A behaviour for updating the Robolocust occupancy grid.
This class implements a behaviour that uses a SLAM algorithm to build an occupancy map of lobot's environment and record its trajectory within this map.
NOTE: This behaviour does not vote for any motor actions.
Definition at line 81 of file LoSurvey.H.
 1.6.3
1.6.3