
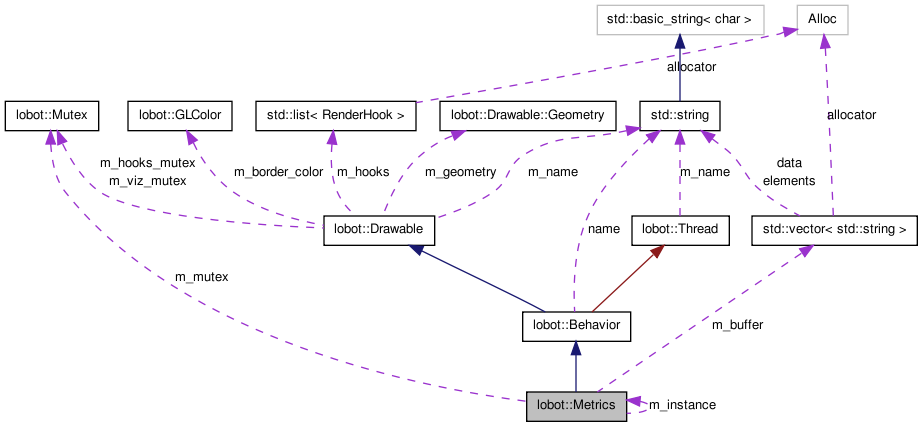
A behaviour for gathering performance metrics about the robot. More...
#include <Robots/LoBot/control/LoMetrics.H>
Classes | |
| struct | endl |
| class | Log |
| A class for creating metrics related log messages and buffering them with the metrics behaviour for subsequent output to the log file. More... | |
| struct | newl |
Static Public Member Functions | |
| static int | opening_phrase_width () |
| static int | opw () |
| A shorter alias for above function. | |
Friends | |
| class | subfactory< Metrics, base > |
| class | Log |
A behaviour for gathering performance metrics about the robot.
This class implements a behaviour that collects all sorts of useful data as lobot runs. For example, we can get information such as the robot's pose history, the time at which a goal is reached, average speed of the robot, number of emergency stop and extrication events, actual and predicted times-to-impact, and so on. All this data is periodically written to a log file, which can then be analyzed off-line.
This behaviour does not control the robot in any way nor does it perform any sort of visualization.
Definition at line 85 of file LoMetrics.H.
| int lobot::Metrics::opening_phrase_width | ( | ) | [static] |
To make the metrics log more readable, each message's initial/opening phrase (such as "tracking pose" or "extricate") is left-justified within a field width specified in the config file. This helper function returns that setting.
Definition at line 266 of file LoMetrics.C.
| static int lobot::Metrics::opw | ( | ) | [inline, static] |
A shorter alias for above function.
Definition at line 291 of file LoMetrics.H.
 1.6.3
1.6.3