
#include <Beobot/BeobotConfig.H>
Public Member Functions | |
| BeobotConfig (std::string fileName) | |
| default constructor, open config fileName and read | |
| BeobotConfig () | |
| default constructor, open config "Beobot.conf" and read | |
| ~BeobotConfig () | |
| default destructor | |
Public Attributes | |
| unsigned int | speedNeutralVal |
| speed servo neutral position | |
| unsigned int | speedMinVal |
| speed servo minimum position | |
| unsigned int | speedMaxVal |
| speed servo maximum position | |
| unsigned int | steerNeutralVal |
| steer servo neutral position | |
| unsigned int | steerMinVal |
| steer servo minimum position | |
| unsigned int | steerMaxVal |
| steer servo maximum position | |
| unsigned int | gearNeutralVal |
| gear servo neutral position | |
| unsigned int | gearMinVal |
| gear servo minimum position | |
| unsigned int | gearMaxVal |
| gear servo maximum position | |
| unsigned int | pwm0NeutralVal |
| PWM0 pulse neutral value. | |
| unsigned int | pwm0MinVal |
| PWM0 pulse minimum value. | |
| unsigned int | pwm0MaxVal |
| PWM0 pulse maximum value. | |
| unsigned int | pwm1NeutralVal |
| PWM1 pulse neutral value. | |
| unsigned int | pwm1MinVal |
| PWM1 pulse minimum value. | |
| unsigned int | pwm1MaxVal |
| PWM1 pulse maximum value. | |
| unsigned int | speedServoNum |
| speed servo number on BeoChip | |
| unsigned int | steerServoNum |
| steering servo number on BeoChip | |
| unsigned int | gearServoNum |
| gear servo number on BeoChip | |
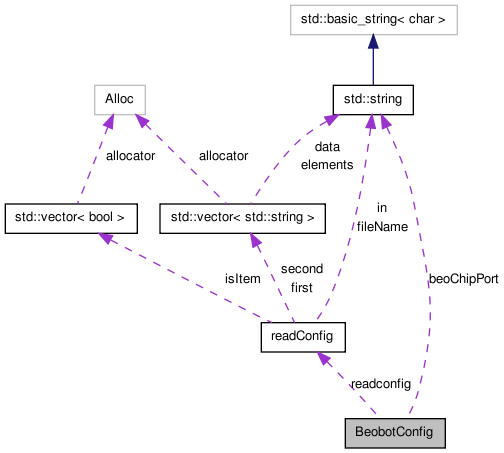
| std::string | beoChipPort |
| BeoChip serial port device;. | |
This class uses readConfig to extract config parameters for BeobotControl It is either from "beobot.conf" or another specified file
Definition at line 43 of file BeobotConfig.H.
| BeobotConfig::BeobotConfig | ( | std::string | fileName | ) |
default constructor, open config fileName and read
Definition at line 46 of file BeobotConfig.C.
References readConfig::openFile().
| BeobotConfig::BeobotConfig | ( | ) |
default constructor, open config "Beobot.conf" and read
Definition at line 39 of file BeobotConfig.C.
References readConfig::openFile().
| BeobotConfig::~BeobotConfig | ( | ) |
default destructor
Definition at line 53 of file BeobotConfig.C.
BeoChip serial port device;.
Definition at line 95 of file BeobotConfig.H.
| unsigned int BeobotConfig::gearMaxVal |
gear servo maximum position
Definition at line 72 of file BeobotConfig.H.
Referenced by main(), and setupBeoChip().
| unsigned int BeobotConfig::gearMinVal |
gear servo minimum position
Definition at line 70 of file BeobotConfig.H.
Referenced by BeobotControl::BeobotControl(), BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::gearNeutralVal |
gear servo neutral position
Definition at line 68 of file BeobotConfig.H.
Referenced by main(), and setupBeoChip().
| unsigned int BeobotConfig::gearServoNum |
gear servo number on BeoChip
Definition at line 93 of file BeobotConfig.H.
Referenced by BeobotControl::BeobotControl(), BeobotControl::getGear(), BotControl::init(), main(), BeobotControl::setGear(), and setupBeoChip().
| unsigned int BeobotConfig::pwm0MaxVal |
PWM0 pulse maximum value.
Definition at line 79 of file BeobotConfig.H.
Referenced by BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::pwm0MinVal |
PWM0 pulse minimum value.
Definition at line 77 of file BeobotConfig.H.
Referenced by BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::pwm0NeutralVal |
PWM0 pulse neutral value.
Definition at line 75 of file BeobotConfig.H.
Referenced by BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::pwm1MaxVal |
PWM1 pulse maximum value.
Definition at line 86 of file BeobotConfig.H.
Referenced by BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::pwm1MinVal |
PWM1 pulse minimum value.
Definition at line 84 of file BeobotConfig.H.
Referenced by BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::pwm1NeutralVal |
PWM1 pulse neutral value.
Definition at line 82 of file BeobotConfig.H.
Referenced by BotControl::init(), main(), and setupBeoChip().
| unsigned int BeobotConfig::speedMaxVal |
speed servo maximum position
Definition at line 58 of file BeobotConfig.H.
Referenced by main(), and setupBeoChip().
| unsigned int BeobotConfig::speedMinVal |
speed servo minimum position
Definition at line 56 of file BeobotConfig.H.
Referenced by main(), and setupBeoChip().
| unsigned int BeobotConfig::speedNeutralVal |
speed servo neutral position
Definition at line 54 of file BeobotConfig.H.
Referenced by BeobotControl::BeobotControl(), main(), and setupBeoChip().
| unsigned int BeobotConfig::speedServoNum |
speed servo number on BeoChip
Definition at line 89 of file BeobotConfig.H.
Referenced by BeobotControl::BeobotControl(), BeobotControl::getSpeed(), BotControl::init(), main(), BeobotControl::setSpeed(), and setupBeoChip().
| unsigned int BeobotConfig::steerMaxVal |
steer servo maximum position
Definition at line 65 of file BeobotConfig.H.
Referenced by main(), and setupBeoChip().
| unsigned int BeobotConfig::steerMinVal |
steer servo minimum position
Definition at line 63 of file BeobotConfig.H.
Referenced by main(), and setupBeoChip().
| unsigned int BeobotConfig::steerNeutralVal |
steer servo neutral position
Definition at line 61 of file BeobotConfig.H.
Referenced by BeobotControl::BeobotControl(), main(), and setupBeoChip().
| unsigned int BeobotConfig::steerServoNum |
steering servo number on BeoChip
Definition at line 91 of file BeobotConfig.H.
Referenced by BeobotControl::BeobotControl(), BeobotControl::getSteer(), BotControl::init(), main(), BeobotControl::setSteer(), and setupBeoChip().
 1.6.3
1.6.3