
A DAMN turn arbiter for controlling Robolocust's steering. More...
#include <Robots/LoBot/control/LoTurnArbiter.H>
Classes | |
| class | Params |
| class | Vote |
Public Member Functions | |
| ~TurnArbiter () | |
| Turn arbiter clean-up. | |
Static Public Member Functions | |
| static int | turn_max () |
| static int | turn_step () |
Friends | |
| class | singleton< TurnArbiter > |
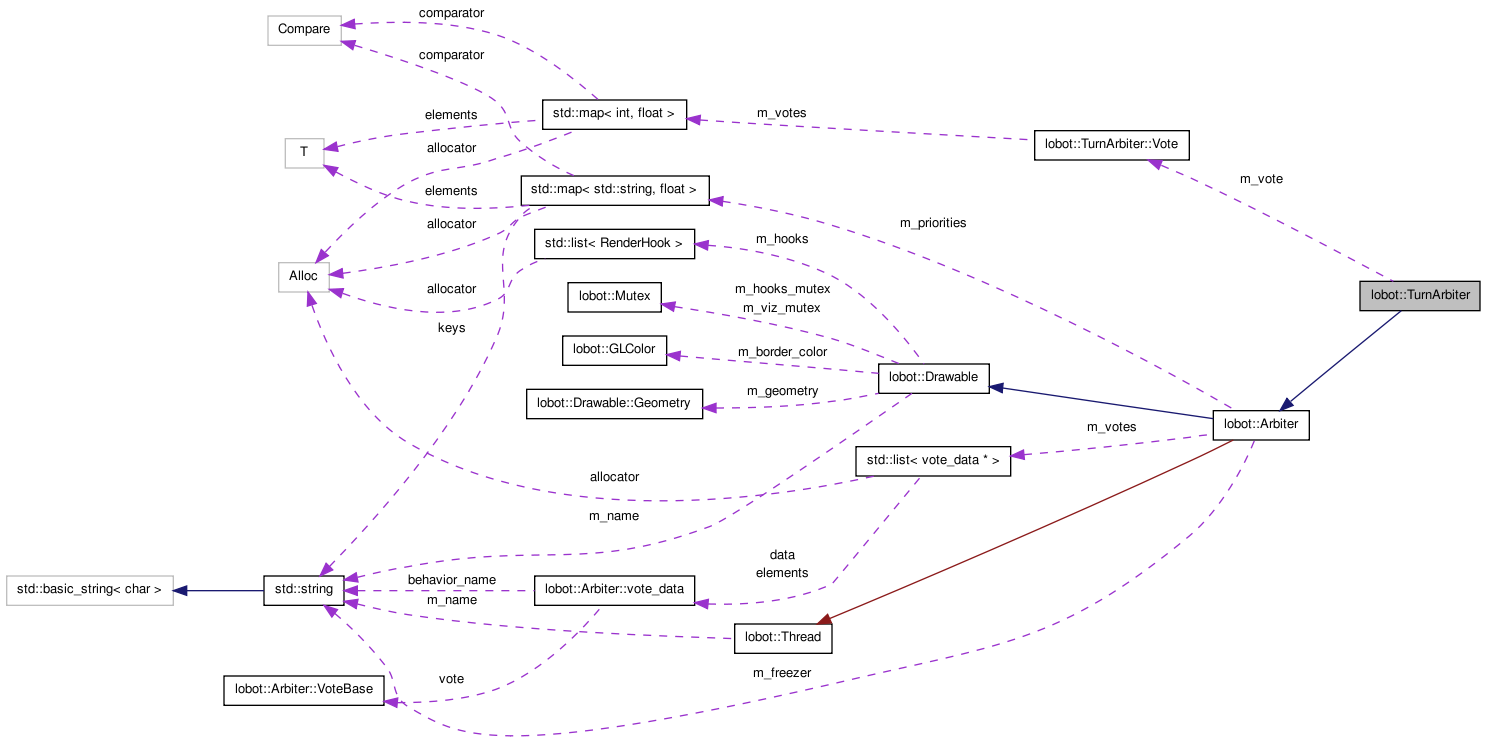
A DAMN turn arbiter for controlling Robolocust's steering.
This class implements a DAMN turn arbiter that acts as the interface between the Robolocust behaviours and the robot's steering controls. The arbiter supports a certain set of turns (hard right, medium right, soft right, straight ahead, etc.). Each behaviour that wants to influence the steering direction will have to vote for or against each of these possible steering commands. The turn arbiter will then tally all the votes using a weighted sum and smoothing procedure and issue the motor control command that ends up with the maximum votes.
Definition at line 78 of file LoTurnArbiter.H.
| lobot::TurnArbiter::~TurnArbiter | ( | ) |
Turn arbiter clean-up.
Definition at line 432 of file LoTurnArbiter.C.
| static int lobot::TurnArbiter::turn_max | ( | ) | [inline, static] |
Helpers to return some turn arbiter parameters used by other modules.
Definition at line 352 of file LoTurnArbiter.H.
Referenced by lobot::TurnArbiter::Vote::Vote().
 1.6.3
1.6.3