
Protected Member Functions | |
| virtual void | start2 () |
| do some additional config at start time; see ModelComponent.H | |
Constructors, destructors, and run-time "modules" | |
|
| |
| enum | MOTOR { BASE, SHOLDER, ELBOW, WRIST1, WRIST2, GRIPPER, EX1, EX2, WRIST_ROLL, WRIST_PITCH } |
| enum | COMMANDS { SAFE_MODE = 9, SET_MOTORS = 10, MOTORS_OFF = 11, GET_ENCODER = 12, RESET_ENCODER = 13, GET_PWM = 14, GET_MS = 15 } |
| RobotArm (OptionManager &mgr, const std::string &descrName="RobotArm", const std::string &tagName="RobotArm") | |
| Constructor. | |
| virtual | ~RobotArm () |
| Virtual destructor for safe inheritance. | |
| virtual bool | setMotor (MOTOR m, int pwm=0) |
| Set the Motor Speed and Direction by pwm. | |
| virtual void | setMotorPos (MOTOR m, int pos) |
| Set the Motor Position by the encoder value. | |
| virtual int | getEncoder (MOTOR m) |
| Get the encoder value from motor. | |
| virtual bool | resetEncoders () |
| Reset all motor encoder value to 0. | |
| virtual void | resetMotorPos () |
| Reset all motor position to the home place. | |
| virtual bool | stopAllMotors () |
| Stop all the motor movement. | |
| virtual void | homeMotor () |
| Do the homeing to the all motor. | |
| virtual void | simLoop () |
| virtual Image< PixRGB< byte > > | getFrame (int camera) |
Definition at line 47 of file RobotArm.H.
| RobotArm::RobotArm | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "RobotArm", |
|||
| const std::string & | tagName = "RobotArm" | |||
| ) | [inline] |
Constructor.
| mgr | our ModelManager (see ModelManager.H) | |
| descrName | descriptive name for human usage | |
| tagName | name for ParamMap usage |
Definition at line 59 of file RobotArm.H.
| virtual RobotArm::~RobotArm | ( | ) | [inline, virtual] |
Virtual destructor for safe inheritance.
Definition at line 67 of file RobotArm.H.
| virtual int RobotArm::getEncoder | ( | MOTOR | m | ) | [inline, virtual] |
Get the encoder value from motor.
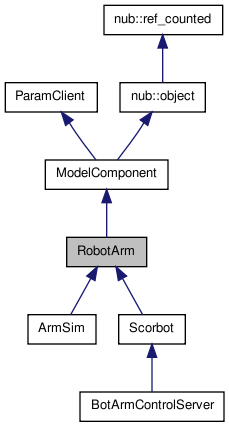
Reimplemented in ArmSim, and Scorbot.
Definition at line 79 of file RobotArm.H.
| virtual void RobotArm::homeMotor | ( | ) | [inline, virtual] |
| virtual bool RobotArm::resetEncoders | ( | ) | [inline, virtual] |
Reset all motor encoder value to 0.
Reimplemented in ArmSim, Scorbot, and Scorbot.
Definition at line 82 of file RobotArm.H.
| virtual void RobotArm::resetMotorPos | ( | void | ) | [inline, virtual] |
Reset all motor position to the home place.
Reimplemented in ArmSim, and Scorbot.
Definition at line 85 of file RobotArm.H.
| virtual bool RobotArm::setMotor | ( | MOTOR | m, | |
| int | pwm = 0 | |||
| ) | [inline, virtual] |
Set the Motor Speed and Direction by pwm.
Reimplemented in ArmSim, and Scorbot.
Definition at line 73 of file RobotArm.H.
| virtual void RobotArm::setMotorPos | ( | MOTOR | m, | |
| int | pos | |||
| ) | [inline, virtual] |
| virtual void RobotArm::start2 | ( | ) | [inline, protected, virtual] |
do some additional config at start time; see ModelComponent.H
Reimplemented from ModelComponent.
Reimplemented in ArmSim, and Scorbot.
Definition at line 102 of file RobotArm.H.
| virtual bool RobotArm::stopAllMotors | ( | ) | [inline, virtual] |
Stop all the motor movement.
Reimplemented in ArmSim, and Scorbot.
Definition at line 88 of file RobotArm.H.
 1.6.3
1.6.3