
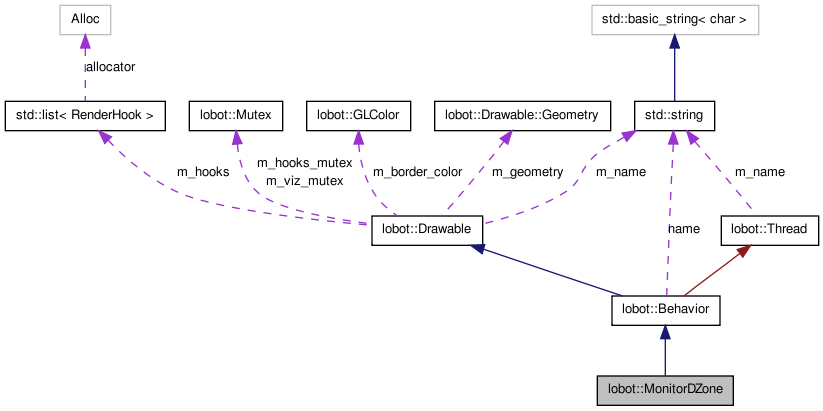
A behaviour for monitoring the robot's danger zone and taking one of several possible actions depending on the user's config settings. More...
#include <Robots/LoBot/control/LoMonitorDZone.H>
Friends | |
| class | subfactory< MonitorDZone, base > |
A behaviour for monitoring the robot's danger zone and taking one of several possible actions depending on the user's config settings.
This class implements a behaviour that monitors the danger zone and takes some user-specified action after it has been penetrated for at least some predetermined period. The supported actions are:
Definition at line 74 of file LoMonitorDZone.H.
 1.6.3
1.6.3