
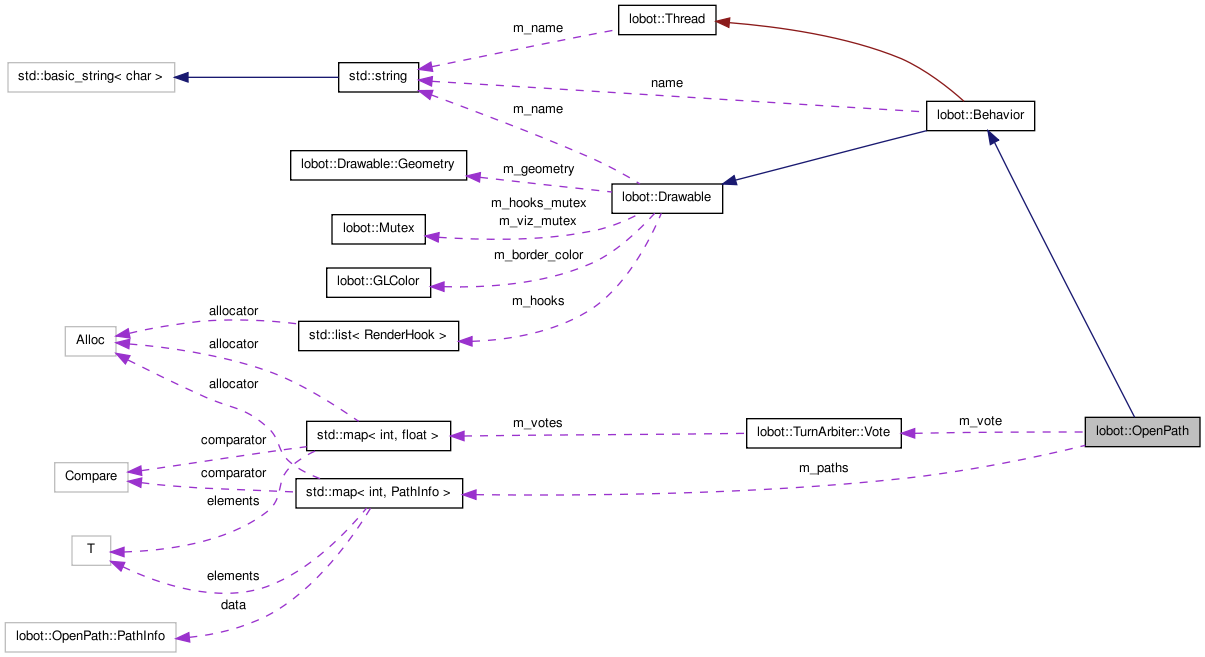
A behaviour for steering the robot toward the most open path that can accommodate it. More...
#include <Robots/LoBot/control/LoOpenPath.H>
Classes | |
| class | PathInfo |
Friends | |
| class | subfactory< OpenPath, base > |
A behaviour for steering the robot toward the most open path that can accommodate it.
This class implements the open path algorithm for steering the robot toward the most open path that can accommodate the robot's width.
The algorithm uses the current set of distance readings from the laser range finder and some trigonometry and vector math to build a list of candidate paths of some user-specified minimum length. It then picks the path with the maximum traversable area and issues a steering vote to turn the robot towards that path.
Definition at line 94 of file LoOpenPath.H.
 1.6.3
1.6.3