
Classes | |
| struct | Mode |
Public Member Functions | |
| IMUDataServer (int id, OptionManager &mgr, const std::string &descrName="BasicBrainComponent", const std::string &tagName="BasicBrainComponent") | |
| Constructor. | |
| ~IMUDataServer () | |
| Destructor. | |
| virtual void | evolve () |
| Main run loop. | |
| void | stop2 () |
| This is called from within stop() after the subcomponents have stopped. | |
| virtual void | updateMessage (const RobotSimEvents::EventMessagePtr &eMsg, const Ice::Current &) |
| Get a message. | |
| virtual void | registerTopics () |
| Component registers itself as publisher/subscriber to topic(s). | |
| bool | initMe () |
| int | doHardwareScan (xsens::Cmt3 &, CmtDeviceId[]) |
| void | doMtSettings (xsens::Cmt3 &, CmtOutputMode &, CmtOutputSettings &, CmtDeviceId[]) |
| void | getUserInputs (CmtOutputMode &, CmtOutputSettings &) |
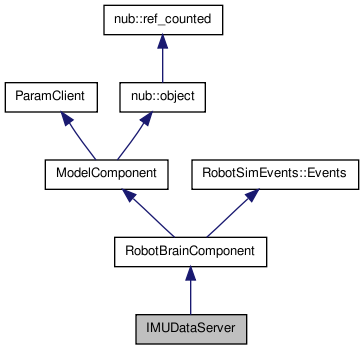
Definition at line 39 of file IMUDataServer.H.
| IMUDataServer::IMUDataServer | ( | int | id, | |
| OptionManager & | mgr, | |||
| const std::string & | descrName = "BasicBrainComponent", |
|||
| const std::string & | tagName = "BasicBrainComponent" | |||
| ) |
Constructor.
Definition at line 35 of file IMUDataServer.C.
| IMUDataServer::~IMUDataServer | ( | ) |
Destructor.
Definition at line 48 of file IMUDataServer.C.
| void IMUDataServer::evolve | ( | ) | [virtual] |
Main run loop.
Reimplemented from RobotBrainComponent.
Definition at line 110 of file IMUDataServer.C.
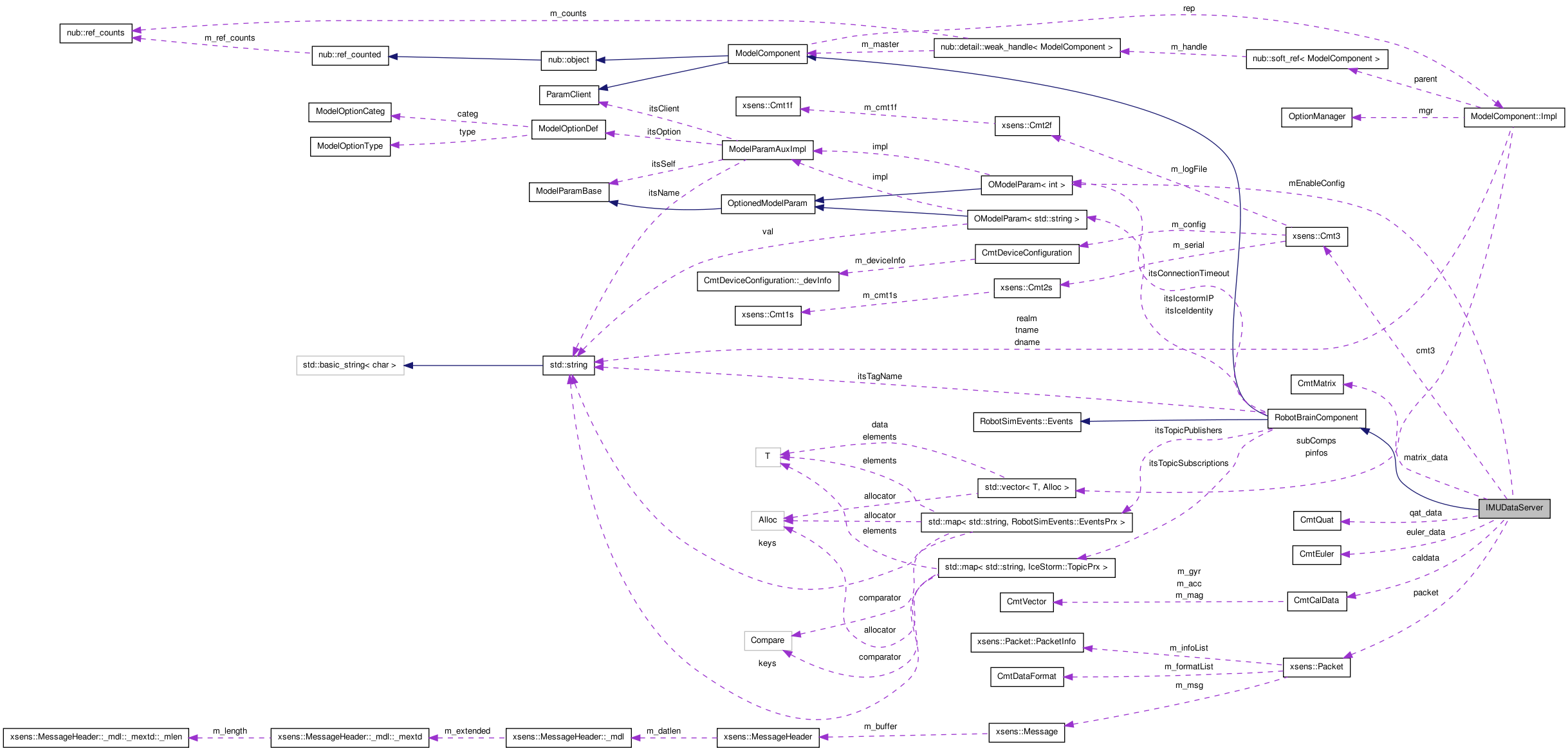
References xsens::Packet::containsPositionLLA(), xsens::Packet::getCalData(), xsens::Packet::getOriEuler(), xsens::Packet::getOriMatrix(), xsens::Packet::getOriQuat(), xsens::Packet::getTemp(), CmtEuler::m_pitch, CmtEuler::m_roll, CmtEuler::m_yaw, RobotBrainComponent::publish(), and xsens::Cmt3::waitForDataMessage().
| void IMUDataServer::registerTopics | ( | ) | [virtual] |
Component registers itself as publisher/subscriber to topic(s).
Reimplemented from RobotBrainComponent.
Definition at line 103 of file IMUDataServer.C.
References RobotBrainComponent::registerPublisher().
| void IMUDataServer::stop2 | ( | ) | [virtual] |
This is called from within stop() after the subcomponents have stopped.
Reimplemented from ModelComponent.
Definition at line 54 of file IMUDataServer.C.
| void IMUDataServer::updateMessage | ( | const RobotSimEvents::EventMessagePtr & | eMsg, | |
| const Ice::Current & | ||||
| ) | [virtual] |
Get a message.
Reimplemented from RobotBrainComponent.
Definition at line 253 of file IMUDataServer.C.
 1.6.3
1.6.3