
#include <Robots/Scorbot/Controller/firmware/mbed/buffered_serial.h>
Public Member Functions | |
| BufferedSerial (PinName tx, PinName rx, uint8_t bufferSize) | |
| bool | readable () |
| uint8_t | availableBytes () |
| uint8_t | peek () |
| uint8_t | getc () |
| long | readLong () |
| void | readBytes (uint8_t *bytes, size_t requested) |
| void | flushBuffer () |
| void | writeLong (long data) |
| template<typename T > | |
| void | setFullCallback (T *object, void(T::*member)(void)) |
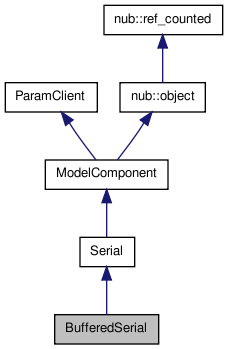
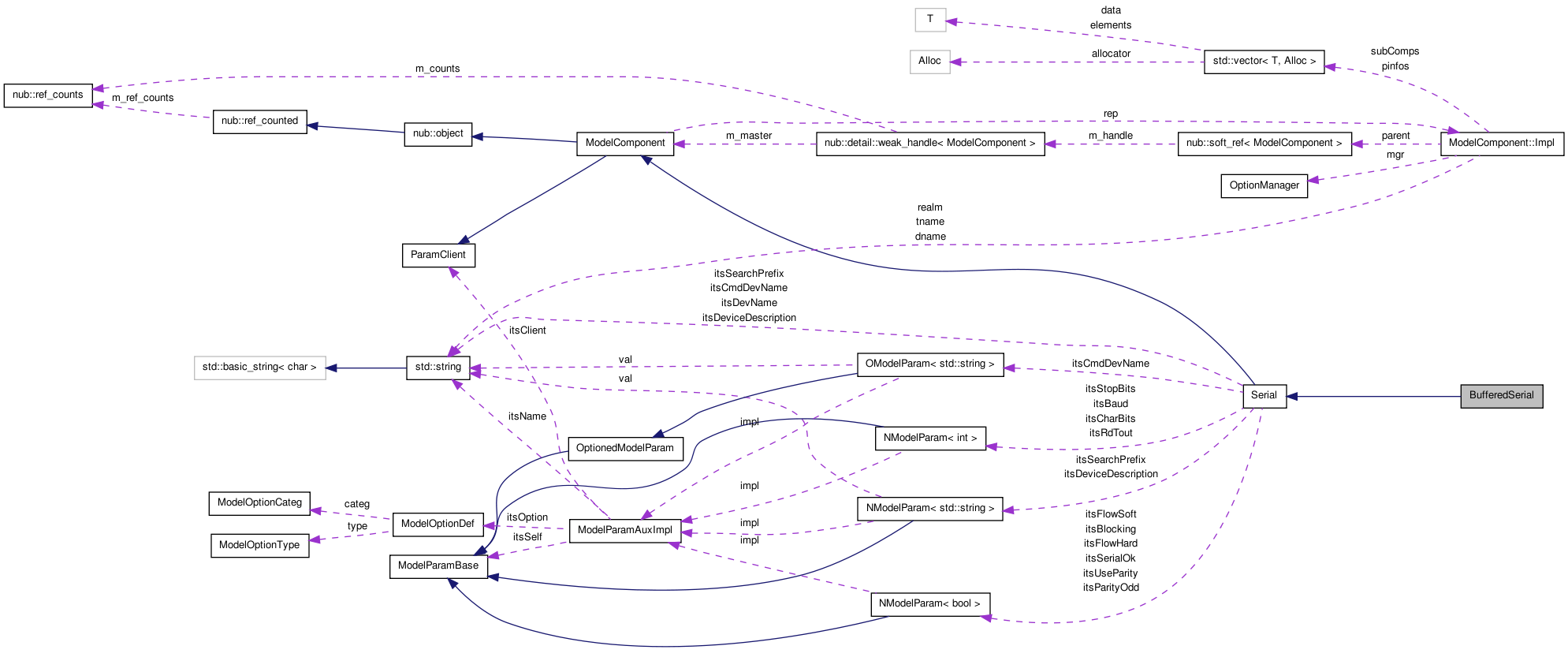
Serial wrapper providing a variable sized RX buffer
Used to store serial data received in a circular buffer in cases where the data stream is larger than the hardware buffer (16 bytes) and the data is not immediately processed. On RXIRQ interrupt (i.e., on receipt of data), new data is retreived from the hardware serial buffer and stored in a circular buffer. If the circular buffer becomes full, no additional data will be added until some of the current data has been removed.
Definition at line 26 of file buffered_serial.h.
| BufferedSerial::BufferedSerial | ( | PinName | tx, | |
| PinName | rx, | |||
| uint8_t | buffer_size | |||
| ) |
Constructs a BufferedSerial object
Creates a BufferedSerial with default settings of 9600 8N1. Valid (TX/RX) pairs are {(USBTX/USBRX), (9/10), (13/14), (28/27)}. Valid baud rates are {110, 300, 600, 1200, 2400, 4800, 9600, 14400, 19200, 38400, 57600, 115200, 230400, 460800, 921600}. Maximum buffer size is 256 bytes.
| PinName | tx The transmit out (TXO) pin for this serial port | |
| PinName | rx The receive in (RXI) pin for this serial port | |
| uint8_t | buffer_size The desired size of the circular buffer |
Definition at line 30 of file buffered_serial.cpp.
| uint8_t BufferedSerial::availableBytes | ( | ) |
Checks how many bytes are ready to be read
Definition at line 72 of file buffered_serial.cpp.
| void BufferedSerial::flushBuffer | ( | ) |
Flushes the receive buffer
Definition at line 160 of file buffered_serial.cpp.
| uint8_t BufferedSerial::getc | ( | ) |
Reads the next available received byte
Removes a single byte from the front of the circular buffer and returns its value. This method will block until a single byte is available.
Definition at line 105 of file buffered_serial.cpp.
Referenced by readBytes(), and readLong().
| uint8_t BufferedSerial::peek | ( | ) |
Reads the next available byte without removing it from the buffer
Reads a single byte from the front of the circular buffer (without removing it from the buffer and returns its value. This method will block until a single byte is available.
Definition at line 87 of file buffered_serial.cpp.
| bool BufferedSerial::readable | ( | ) |
Checks if there are bytes ready to be read
Definition at line 61 of file buffered_serial.cpp.
| void BufferedSerial::readBytes | ( | uint8_t * | bytes, | |
| size_t | requested_bytes | |||
| ) |
Reads requested_bytes bytes into a provided buffer
Reads a specified number of bytes into a caller-supplied buffer. This method will block until requested_bytes bytes are available. The reads are performed byte-wise and will remove the byte from the circular buffer as it is added to the destination buffer.
| uint8_t* | bytes The pre-allocated destination buffer | |
| size_t | requested_bytes The number of bytes to move into the buffer |
Definition at line 151 of file buffered_serial.cpp.
References getc().
| long BufferedSerial::readLong | ( | ) |
Reads the next four bytes into a long data type
Reads the next four bytes and stores them into a signed long data type. This method will block until four bytes are available. The first byte is considered to be the MSB, and the last byte is considered to be the LSB.
Definition at line 129 of file buffered_serial.cpp.
References getc().
| void BufferedSerial::setFullCallback | ( | T * | object, | |
| void(T::*)(void) | member | |||
| ) | [inline] |
Set a callback function when buffer fills
Set a member function on a particular object to be called once the buffer becomes full. While this this callback function is running, no additional data will be received (even if the callback function immediately empties the buffer). If this becomes an issue, we can add a Timeout to call the callback 1us later, which would allow us to receive data again.
| T* | object The object on whom the callback should be made | |
| void | (T::*member)(void) The member which should be called back |
Definition at line 57 of file buffered_serial.h.
 1.6.3
1.6.3