
Public Member Functions | |
| BotControlServer_i (OptionManager &mgr, bool debug) | |
| virtual void | init () |
| Init process. | |
| virtual float | getSpeed () |
| set the speed -1.0 (reverse) ... 1.0 (forward) | |
| virtual short | setSpeed (const float speed) |
| get the speed -1.0 ... 1.0 | |
| virtual float | getSteering () |
| gets steering angle; input from -1.0 (full left) to 1.0 (full right) | |
| virtual short | setSteering (const float steeringPos) |
| sets steering angle; input from -1.0 (full left) to 1.0 (full right) | |
| virtual ImageOrb * | getImageSensor (const short i) |
| virtual void | getImageSensorDims (short &w, short &h, const short i) |
| void | setInfo (const char *info, const Point2DOrb &trackLoc, const Point2DOrb &recLoc) |
| short | getUserInput (Point2DOrb &loc) |
| virtual void | shutdown () |
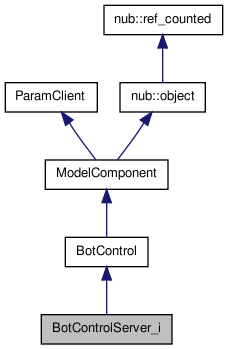
Definition at line 64 of file BotControlServer.H.
| float BotControlServer_i::getSpeed | ( | ) | [virtual] |
set the speed -1.0 (reverse) ... 1.0 (forward)
Reimplemented from BotControl.
Definition at line 102 of file BotControlServer.C.
| float BotControlServer_i::getSteering | ( | ) | [virtual] |
gets steering angle; input from -1.0 (full left) to 1.0 (full right)
Reimplemented from BotControl.
Definition at line 112 of file BotControlServer.C.
| void BotControlServer_i::init | ( | ) | [virtual] |
| short BotControlServer_i::setSpeed | ( | const float | speedPos | ) | [virtual] |
get the speed -1.0 ... 1.0
Reimplemented from BotControl.
Definition at line 107 of file BotControlServer.C.
| short BotControlServer_i::setSteering | ( | const float | steeringPos | ) | [virtual] |
sets steering angle; input from -1.0 (full left) to 1.0 (full right)
Reimplemented from BotControl.
Definition at line 117 of file BotControlServer.C.
 1.6.3
1.6.3