
#include "Component/ModelManager.H"#include "Devices/DeviceOpts.H"#include "Devices/FrameGrabberConfigurator.H"#include "GUI/XWinManaged.H"#include "Image/CutPaste.H"#include "Image/Image.H"#include "Image/Pixels.H"#include "RCBot/BotControl.H"#include "Raster/Raster.H"#include "Transport/FrameIstream.H"#include "Util/Timer.H"#include <arpa/inet.h>#include <fcntl.h>#include <netdb.h>#include <signal.h>#include <stdlib.h>#include <unistd.h>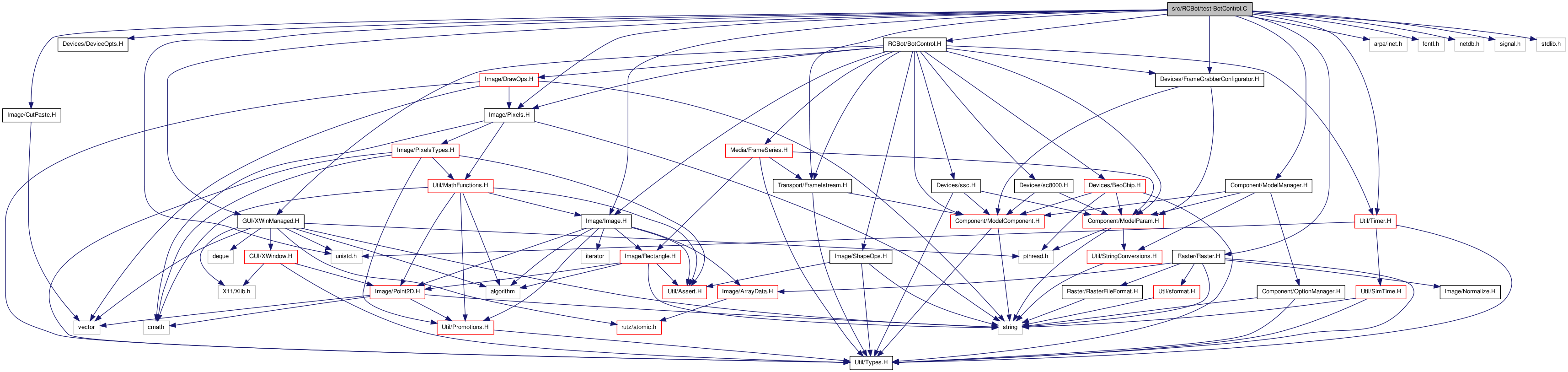
Go to the source code of this file.
Functions | |
| void | terminate (int s) |
| Signal handler (e.g., for control-C). | |
| int | main (const int argc, const char **argv) |
Variables | |
| static bool | goforever = true |
| Will turn false on interrupt signal. | |
test the Robot Controller
Definition in file test-BotControl.C.
| void terminate | ( | int | s | ) |
Signal handler (e.g., for control-C).
Definition at line 61 of file test-BotControl.C.
References goforever.
bool goforever = true [static] |
Will turn false on interrupt signal.
Definition at line 58 of file test-BotControl.C.
Referenced by terminate().
 1.6.3
1.6.3