
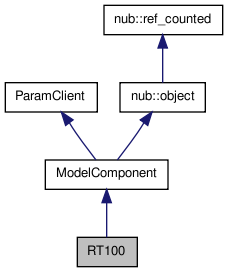
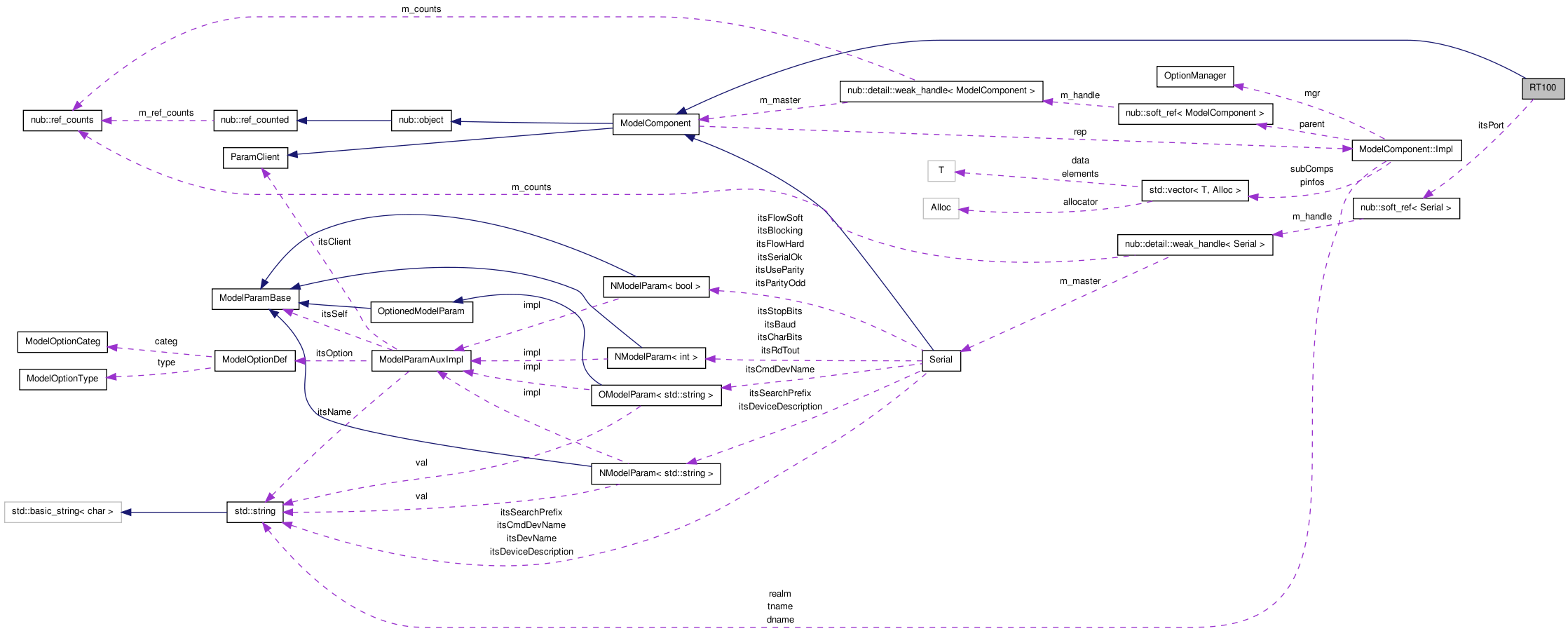
Interface to a serial-servo-controller. More...
#include <Devices/rt100.H>
Public Types | |
| enum | MOTOR_STATUS { TASK_IN_PROGRESS = 0, TASK_COMPLETE = 1, ERROR_LIMIT_EXCEEDED = 2, NO_MOVEMENT = 3, MODE_ABSOLUTE_RELATIVE = 4, MODE_POSITION_FORCE = 5 } |
| enum | IP { IP0 = 0, IP1 = 1 } |
| enum | PARAM { CP_ERROR, CURRENT_POSITION, ERROR_LIMIT, NEW_POSITION, SPEED, KP, KI, KD, DEAD_BAND, OFFSET, MAX_FORCE, CURRENT_FORCE, ACCELERATION_TIME, USER_RAM, USER_IO, ACTUAL_POSITION } |
| enum | IP0MOTORS { IP0BASE1, IP0BASE2, IP0WRIST1, IP0WRIST2, IP0SENSOR } |
| enum | IP1MOTORS { IP1ELBOW, IP1SHOLDER, IP1ZED, IP1YAW, IP1GRIPPER } |
| enum | JOINTS { BASE1, BASE2, WRIST1, WRIST2, ROLL_WRIST, TILT_WRIST, SENSOR, ELBOW, SHOLDER, ZED, YAW, GRIPPER } |
| enum | MOTORS_TOGGLES { FORCE_POSITION, ABSOLUTE_RELATIVE, USER_INPUTOUTPUT } |
| enum | MOTORES_STOP { DEAD_STOP, RAMP_STOP, FREE_STOP, FREE_OFF } |
Public Member Functions | |
| RT100 (OptionManager &mgr, const std::string &descrName="UMI RT100 Robot Arm Controller", const std::string &tagName="RT100Controller", const char *defdev="/dev/ttyS0") | |
| Default constructor; see ModelComponent.H. | |
| ~RT100 () | |
| Destructor. | |
| int | init () |
| initalize the arm and set default values; | |
| int | shutdown () |
| shutdown the arm and switch off all motors | |
| int | getNumJoints () |
| get the number of joints | |
| int | setJointPosition (JOINTS joint, short int position, bool immediate=false) |
| set the joint position, if immediate is true, then initiate a move command | |
| int | getJointPosition (JOINTS joint, short int *position) |
| get the current joints position | |
| int | setJointParam (JOINTS joint, PARAM param, short int val) |
| set the joint parameter | |
| int | moveArm (bool waitUntilComplete=false) |
| move the arm to the new position | |
| bool | moveComplete () |
| return if the move arm completed | |
| int | interpolationMove (std::vector< short int > &moveVals) |
| move the arm in interpolation mode | |
| int | deferredWrite (IP ipID, unsigned int ctrl, PARAM param, short int val) |
| deferred write param to a particuler ctrl (done in 2 transactions) | |
| int | deferredRead (IP ipID, unsigned int ctrl, PARAM param, short int *val) |
| deferred read param from a particuler ctrl (done in 2 transactions) | |
| int | immediateRead (IP ipID, unsigned int ctrl, PARAM param, short int *val) |
| immediate read param from a particuler ctrl (done in 1 transactions) | |
| int | immediateWrite (IP ipID, unsigned int ctrl, PARAM param, short int val) |
| immediate write param to a particuler ctrl (done in 1 transactions) | |
| int | rawCommand (IP ip, unsigned char cmdType, unsigned char *resCode, short int *results=NULL) |
| send raw commands to the arm (one byte command) | |
| int | rawCommand (IP ipID, unsigned char cmdType, unsigned char *resCode, unsigned char *byte1, unsigned char *byte2) |
| send raw commands to the arm (one byte command) | |
| int | rawCommand (IP ip, unsigned char cmdType, unsigned char byte1, unsigned char byte2, unsigned char *resCode) |
| send raw commands to the arm (three byte command) | |
| void | initZed () |
| initalize zed to home position and reset counters | |
| void | initGripper () |
| initalize gripper to home position and reset counters | |
| void | initWrist () |
| initalize wrist to home position and reset counters | |
| void | initSholder () |
| initalize sholder to home position and reset counters | |
| void | initElbowYaw () |
| initalize elbow and yaw to home position and reset counters | |
| void | gotoHomePosition () |
| move the arm to home position | |
Static Public Attributes | |
| static const int | RT100_OK = 0 |
| static const int | RT100_FAIL = 1 |
| static const unsigned char | EMERGENCY_STOP = 0x24 |
| static const unsigned int | NUM_JOINTS = 12 |
Protected Member Functions | |
| int | switchIP (IP ipID) |
Protected Attributes | |
| nub::soft_ref< Serial > | itsPort |
| Serial port to use. | |
Interface to a serial-servo-controller.
Definition at line 50 of file rt100.H.
| RT100::RT100 | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "UMI RT100 Robot Arm Controller", |
|||
| const std::string & | tagName = "RT100Controller", |
|||
| const char * | defdev = "/dev/ttyS0" | |||
| ) |
Default constructor; see ModelComponent.H.
Definition at line 44 of file rt100.C.
References ModelComponent::addSubComponent(), and itsPort.
| int RT100::deferredRead | ( | IP | ipID, | |
| unsigned int | ctrl, | |||
| PARAM | param, | |||
| short int * | val | |||
| ) |
| int RT100::deferredWrite | ( | IP | ipID, | |
| unsigned int | ctrl, | |||
| PARAM | param, | |||
| short int | val | |||
| ) |
deferred write param to a particuler ctrl (done in 2 transactions)
Definition at line 696 of file rt100.C.
References itsPort.
Referenced by gotoHomePosition(), initElbowYaw(), initGripper(), initSholder(), initWrist(), initZed(), setJointParam(), and setJointPosition().
| int RT100::getJointPosition | ( | JOINTS | joint, | |
| short int * | position | |||
| ) |
get the current joints position
Definition at line 188 of file rt100.C.
References ASSERT, and immediateRead().
| void RT100::gotoHomePosition | ( | ) |
move the arm to home position
Definition at line 398 of file rt100.C.
References deferredWrite(), and rawCommand().
Referenced by init().
| int RT100::immediateRead | ( | IP | ipID, | |
| unsigned int | ctrl, | |||
| PARAM | param, | |||
| short int * | val | |||
| ) |
immediate read param from a particuler ctrl (done in 1 transactions)
Definition at line 735 of file rt100.C.
References itsPort.
Referenced by getJointPosition().
| int RT100::immediateWrite | ( | IP | ipID, | |
| unsigned int | ctrl, | |||
| PARAM | param, | |||
| short int | val | |||
| ) |
| int RT100::init | ( | ) |
initalize the arm and set default values;
Definition at line 352 of file rt100.C.
References gotoHomePosition(), immediateWrite(), initElbowYaw(), initGripper(), initSholder(), initWrist(), initZed(), itsPort, and rawCommand().
| void RT100::initElbowYaw | ( | ) |
initalize elbow and yaw to home position and reset counters
Definition at line 609 of file rt100.C.
References deferredWrite(), and rawCommand().
Referenced by init().
| void RT100::initGripper | ( | ) |
initalize gripper to home position and reset counters
Definition at line 449 of file rt100.C.
References deferredWrite(), and rawCommand().
Referenced by init().
| void RT100::initSholder | ( | ) |
initalize sholder to home position and reset counters
Definition at line 574 of file rt100.C.
References deferredWrite(), and rawCommand().
Referenced by init().
| void RT100::initWrist | ( | ) |
initalize wrist to home position and reset counters
Definition at line 512 of file rt100.C.
References deferredWrite(), and rawCommand().
Referenced by init().
| void RT100::initZed | ( | ) |
initalize zed to home position and reset counters
Definition at line 418 of file rt100.C.
References deferredWrite(), and rawCommand().
Referenced by init().
| int RT100::interpolationMove | ( | std::vector< short int > & | moveVals | ) |
move the arm in interpolation mode
Definition at line 271 of file rt100.C.
References ASSERT, and rawCommand().
| int RT100::moveArm | ( | bool | waitUntilComplete = false |
) |
| bool RT100::moveComplete | ( | ) |
| int RT100::rawCommand | ( | IP | ip, | |
| unsigned char | cmdType, | |||
| unsigned char | byte1, | |||
| unsigned char | byte2, | |||
| unsigned char * | resCode | |||
| ) |
| int RT100::rawCommand | ( | IP | ipID, | |
| unsigned char | cmdType, | |||
| unsigned char * | resCode, | |||
| unsigned char * | byte1, | |||
| unsigned char * | byte2 | |||
| ) |
| int RT100::rawCommand | ( | IP | ip, | |
| unsigned char | cmdType, | |||
| unsigned char * | resCode, | |||
| short int * | results = NULL | |||
| ) |
send raw commands to the arm (one byte command)
Definition at line 831 of file rt100.C.
References itsPort.
Referenced by gotoHomePosition(), init(), initElbowYaw(), initGripper(), initSholder(), initWrist(), initZed(), interpolationMove(), moveArm(), moveComplete(), and setJointPosition().
| int RT100::setJointParam | ( | JOINTS | joint, | |
| PARAM | param, | |||
| short int | val | |||
| ) |
| int RT100::setJointPosition | ( | JOINTS | joint, | |
| short int | position, | |||
| bool | immediate = false | |||
| ) |
set the joint position, if immediate is true, then initiate a move command
Definition at line 121 of file rt100.C.
References deferredWrite(), and rawCommand().
| int RT100::shutdown | ( | ) |
nub::soft_ref<Serial> RT100::itsPort [protected] |
Serial port to use.
Definition at line 166 of file rt100.H.
Referenced by deferredRead(), deferredWrite(), immediateRead(), immediateWrite(), init(), rawCommand(), and RT100().
 1.6.3
1.6.3