
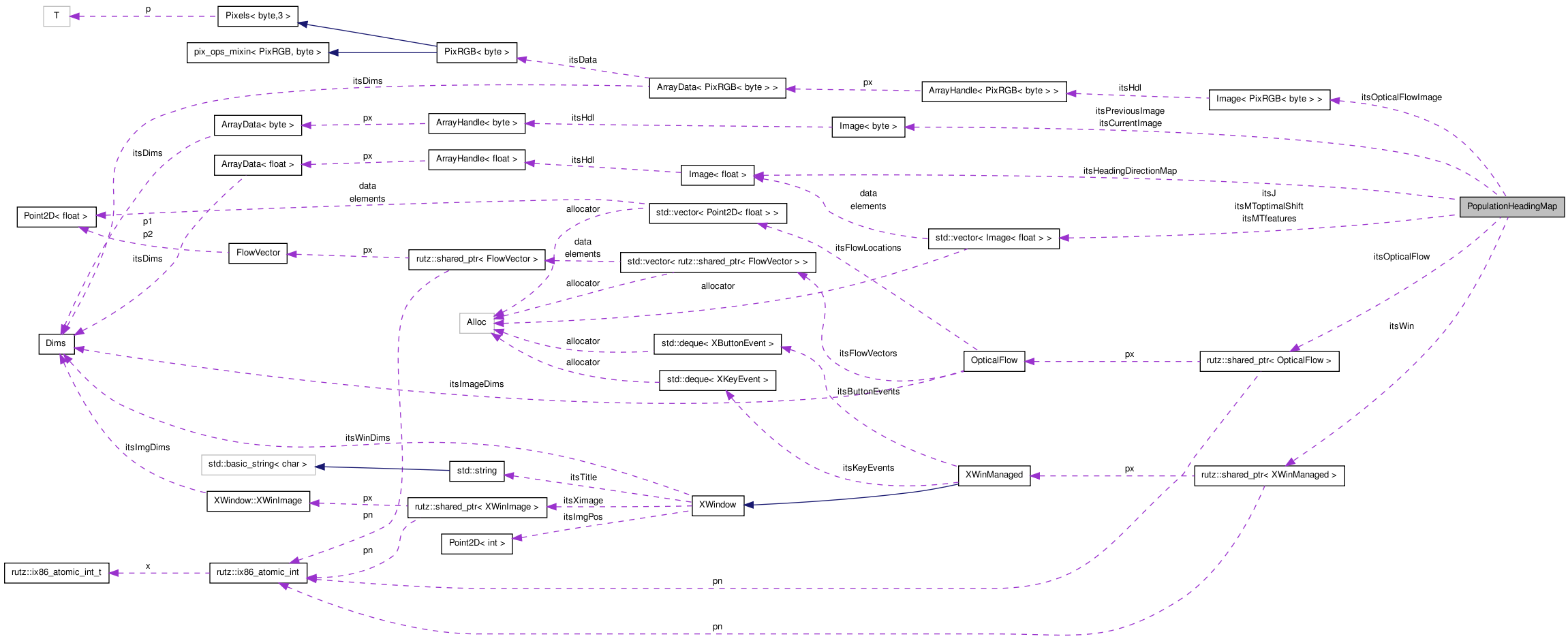
Lappe&Rauschecker's Population Heading Map algorithm. More...
#include <Robots/Beobot2/Navigation/FOE_Navigation/PopulationHeadingMap.H>
Public Member Functions | |
Constructor, assigment and destructor | |
| PopulationHeadingMap (float focalLength) | |
| Constructor. | |
| PopulationHeadingMap (const std::string &name="") | |
| blank constructor with an optional name entry | |
| void | initialize (Dims dims) |
| function to populate the weights | |
| ~PopulationHeadingMap () | |
| function to load the weights from a file | |
Access functions | |
| void | setFocalLength (float focalLength) |
Compute functions | |
| void | getFOE (Image< byte > stim1, Image< byte > stim2) |
| return FOE from image of movement between the two input images | |
| void | getFOE (Image< byte > stim) |
| return | |
Lappe&Rauschecker's Population Heading Map algorithm.
Definition at line 51 of file PopulationHeadingMap.H.
| PopulationHeadingMap::PopulationHeadingMap | ( | float | focalLength | ) |
Constructor.
Definition at line 60 of file PopulationHeadingMap.C.
| PopulationHeadingMap::PopulationHeadingMap | ( | const std::string & | name = "" |
) |
blank constructor with an optional name entry
| PopulationHeadingMap::~PopulationHeadingMap | ( | ) |
function to load the weights from a file
function to save weights Destructor
Definition at line 73 of file PopulationHeadingMap.C.
return
return FOE from image of movement between this image and the previous one
Definition at line 105 of file PopulationHeadingMap.C.
References drawOpticFlow(), getCleanOpticFlow(), Image< T >::getDims(), Image< T >::initialized(), rutz::shared_ptr< T >::is_invalid(), rutz::shared_ptr< T >::reset(), Raster::waitForKey(), and ZEROS.
return FOE from image of movement between the two input images
Definition at line 96 of file PopulationHeadingMap.C.
| void PopulationHeadingMap::initialize | ( | Dims | dims | ) |
function to populate the weights
Definition at line 79 of file PopulationHeadingMap.C.
 1.6.3
1.6.3