
The task-relevance map base class. More...
#include <Neuro/TaskRelevanceMap.H>
Public Member Functions | |
Constructor, destructor, and reset | |
| TaskRelevanceMap (OptionManager &mgr, const std::string &descrName="Task-Relevance Map", const std::string &tagName="TaskRelevanceMap") | |
| Ininitialized constructor. | |
| virtual | ~TaskRelevanceMap () |
| Destructor. | |
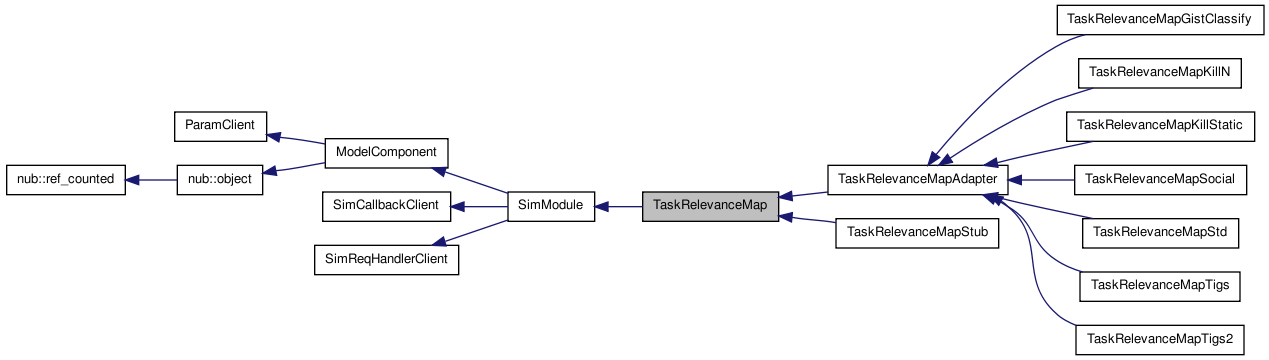
The task-relevance map base class.
This is a 2D task-relevance map. It is just a base class with virtual function definitions. Various implementations are available below. The TRM is a topographic map where a value of zero indicates that a location is not relevant to the task at hand, while a value of 1.0 indicates neutral relevance and values higher than 1.0 indicate high relevance.
Definition at line 65 of file TaskRelevanceMap.H.
| TaskRelevanceMap::TaskRelevanceMap | ( | OptionManager & | mgr, | |
| const std::string & | descrName = "Task-Relevance Map", |
|||
| const std::string & | tagName = "TaskRelevanceMap" | |||
| ) |
Ininitialized constructor.
The map will be resized and initialized the first time input() is called
Definition at line 79 of file TaskRelevanceMap.C.
| TaskRelevanceMap::~TaskRelevanceMap | ( | ) | [virtual] |
Destructor.
Definition at line 86 of file TaskRelevanceMap.C.
 1.6.3
1.6.3